

V tomto posledním dílu se podíváme blíže na konstrukci trochu masivnějšícho robota MOB-02 „model Super C“ napájeného výhradně ze superkondenzátorů, který se orientuje v prostoru pomocí ultrazvukových čidel.
Základem je dvoukolový podvozek MOB-02 osazený 12 V stejnosměrnými motory TT (GM-37-64) s převodovkou 90:1 (64 rpm). Tento podvozek se standardně dodává s měkkými gumovými koly pro terénní modely aut, nicméně tato kola mají dost velký valivý odpor a v interiéru na podlaze není potřeba jejich odpružení, takže byla nahrazena úzkými a mnohem tvrdšími koly určenými původně pro koloběžky. K montáži na hřídel o průměru 6 mm slouží unašeč Pololu. Vliv na spotřebu je poměrně výrazný, při napájení motorů sníženým napětím 7 V, které k přiměřené jízdě naprosto stačí, se podařilo výměnou kol ušetřit více než 45% energie.

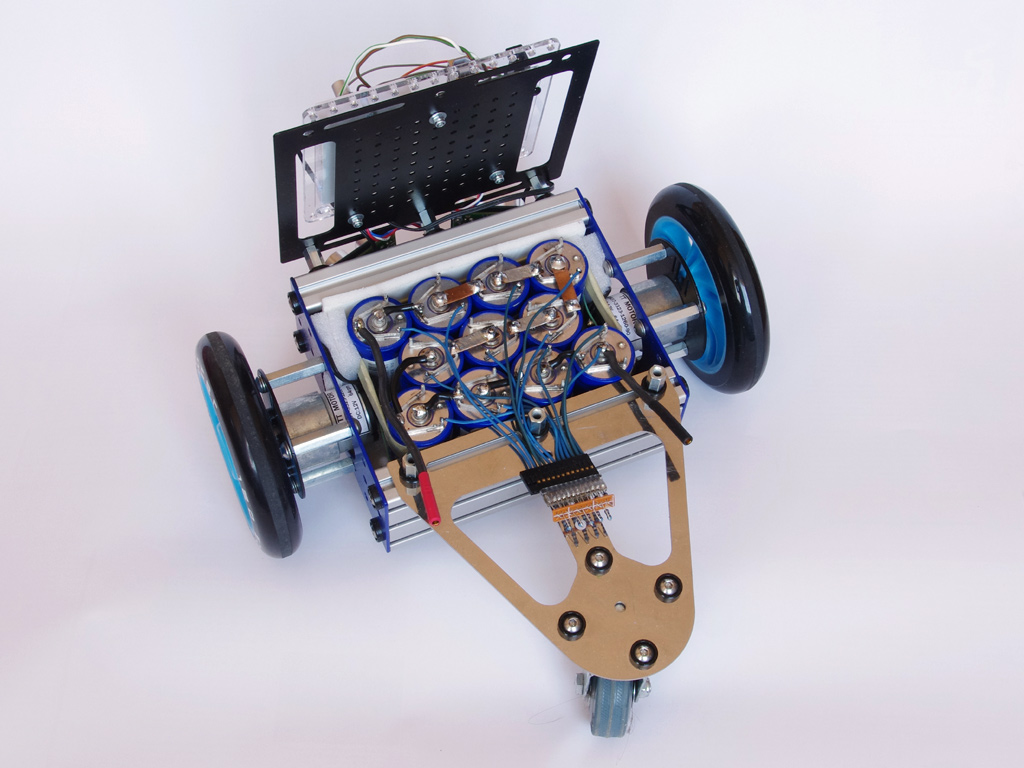
Celkový pohled na robota

Srovnání původního kola (dola) a užšího pro koloběžky
Další úpravou podvozku bylo zvýšení horní kovové desky pomocí distančních sloupků o 15 mm a současně uvolnění horního příčného nosníku vpředu a podložení jeho spojů po stranách plastovými kluznými podložkami. Deska není vzadu přišroubovaná, jen volně leží na distancích, takže se může vzadu volně zvednout jako kapota u auta a dovolit přístup k napájecím kondenzátorům.
Pohled zezadu se zvednutým krytem
K napájení je použito 11 ks sériově spojených superkondenzátorů Maxwell 350 F / 2,7 V, takže výsledný kondenzátor je 31,8 F / 29,7 V. Masivní silové vývody sady v uspořádání 4-3-4 jsou vyvedeny směrem vzad a slouží jak k nabíjení, tak k připojení elektroniky robota a jeho napájení. Kromě silových vývodů je dozadu vyveden i servisní kabel, který zpřístupňuje všechny spoje mezi kondenzátory. K tomuto kabelu se připojuje balancer.
Celá elektronika je soustředěna na horní desce robota a využívá základní desku z plexiskla a na ní uchycené standardní Arduino UNO. Na kontaktním poli jsou dva moduly nad sebou, jinak se nevešly. Dole je driver Pololu #2137 pro dva stejnosměrné motory (nebo jeden krokový motor) řízené PWM založený na obvodu A4990. Tento řadič má provozní napětí od 7 do 28 V a zvládne proud až 0,7 A pro každý z můstků trvale.
Nad řadičem je napájecí Up/Down měnič, který dělá z napětí na kondenátorech stabilní napájecí napětí 7,0 V. Tento měnič je schopen pracovat v rozsahu 3 – 35 V, což téměř přesně odpovídá. Dodá proud až 2 A, ale zejména ve zvyšujícím režimu má menší zatížitelnost sotva 1 A, i tak stačí. Driver pro motory je napájen stejně jako (lineární) stabilizátor Arduina napětím 7 V z měniče, nicméně další stupeň stabilizace před mikrokontrolérem výrazně zvyšuje odolnost proti průniku rušení od motorů, žádné problémy se v provozu neprojevily.

Detail elektroniky
Obecně není použití Arduina pro podobné účely optimální, protože má zbytečně velkou spotřebu energie, a ani lineární stabilizace napětí pro mikrokontrolér není úsporná. Cílem však bylo mimo jiné ukázat, že nějaké „škudlení“ není zase tak nutné. Hmotnost kompletně vybaveného robota je 2950 g.

Pohled na měnič (pod ním driver motorů)
Funkce je jednoduchá a slouží především k předvedení toho, jak dlouho se téměř tříkilový robot dokáže s daným napájením hýbat. „Chytrost“ chování není podstatná. Po zapnutí připojením napájení se asi 2 s počká, pak se robot otočí více než jednou kolem dokola s měří volný prostor kolem sebe. Následně se začne točit na druhou stranu a když se dostane do směru, v němž měl nejvíce prostoru (s tolerancí 20%), rozjede se vpřed. Samozřejmě průběžně ultrazvukovými čidlo kontroluje, jestli je cesta volná. Jakmile dojede před překážku, ve dvou stupních zpomalí, zastaví se při změřené vzdálenosti 25 cm, a pak se cyklus s „rozhlédnutím“ a určením dalšího směru opakuje. Cílem je pouze zajistit, aby se robot (s nepatrnými prodlevami) nepřetržitě hýbal a jezdil ve vymezeném prostoru (ohrádce).
Jízda končí řízeným zastavením při poklesu napětí na výstupu měniče na 6,5 V, tou dobou je na kondenzátorech něco mezi 3 a 4 V. Celkově lze vyčerpat z kondenzátorů až 98% uložené energie, do dalšího cyklu zůstane jen nepatrný zbytek. Snižující měnič je navíc účinný a pracuje po většinu doby chodu, režim zvyšování napětí nastane až po vyčerpání více než 93% energie, tedy v uplném závěru jízdy.
Nezmínil jsem se o balancování. Pokud by měl být robot pravidelně a často v provozu, musel by být vybaven plnohodnotným balancerem pro všech 11 kondenzátorů. Arduino by to zvládlo, nicméně i obvodové řešení k němu by tuto předváděcí konstrukci značně zkomplikovalo. Využil jsem toho, že kondenzátory Maxwell mají prakticky shodné vlastnosti a jsou-li nabíjeny a vybíjeny stejným (společným) proudem, ani v průběhu několika po sobě jdoucích cyklů se „nerozjedou“. Tento robot je využíván jen pro několikanásobné předvádění a pak je déle odstaven. Všech těchto faktů jsem využil (nebo možná tak trochu zneužil) a místo balanceru nasadil odporový vybíječ, který se do servisního konektoru zapojí vždy po předvádění.

Nejjednodušší podoba vybíječe („balanceru“)
Vybíječ na každý z kondenzátorů připojí rezistor 18 Ω / 0,4 W. Rezistory jsou dimenzované tak, aby bylo možné je zapojit i na plně nabitý kondenzátor, nicméně pak by hřály opravdu hodně. Typicky se připojují na zbytkové napětí po vybití. Rezistory srovnají napětí všech kondenzátorů (do nuly) a při dalším použití nemůže nastat situace, kdy by vlivem rozdílného samovybíjení došlo z „rozjetí“. Je to hodně zjednodušený způsob balancování a využívá všech okolností, které takové zjednodušení v tomto konkrétním případě dovolily, pro obecné účely by muselo být balancování plnohodnotné, tedy průběžné, s větším proudem a měřením napětí na každém kondenzátoru jednotlivě.
Jaký je výsledek? Doba nepřetržitého chodu robota se pohybuje přes 110 minut (téměř dvě hodiny) a je mírně proměnlivá podle toho, jak velký prostor k manévrování robot má a jaký je poměr mezi přímou jízdou a otáčením při „rozhlížení“. S akumulátory by byla doba činnosti pochopitelně delší, ale i toto pro většinu účelů stačí a příprava k další jízdě může být téměř blesková
Použité kondenzátory, které jsou určené pro méně výkonné aplikace (typicky pro vykrývání špiček odběru v hudebních zesilovačích), lze teoreticky nabíjet proudem přes 150 A. To ale jde využít, jen pokud je k dispozici odpovídající zdroj 29 V, malá rezerva je kvůli zjednodušenému balancování. Maximálním proudem by trvalo nabíjení méně než 5 sekund. Toto je skutečně dosažitelné, máme-li vhodný zdroj, a také jsou-li spojovací můstky mezi kondenzátory dostatečně dimenzované (měděná pásovina). Při takovém proudu se kondenzátory zahřejí a musí dostat čas na vychladnutí. Jen na okraj připomínám, že výkon zdroje musí být kolem 5 kW! Podobné nabíjení je v amatérských podmínkách přinejmenším „mírně“ obtížné a je otázkou, zda kromě ověření, že to opravdu jde, má takové urychlení nabíjení nějaký praktický význam. V popisované aplikaci robota je jasné, že ne.

Vhodný rychlý nabíjecí zdroj 900 W
Reálný nabíjecí proud, na který jsou dimenzované spoje mezi kondenzátory a konektory u daného robota, je 30 A. K nabíjení lze použít standardní modelářský napájecí zdroj 12 – 30 V / 30 A, jeden z možných starších typů je na obrázku. S tímto zdrojem využitým na mez jeho výkonu trvá nabíjení kolem 35 s, to je asi optimální kompromis, pokud jde o rozumnými prostředky dosažitelné rychlé nabíjení. S levnějšími verzemi zdrojů s mezním proudem 20 A se stále ještě zvládne nabíjení do jedné minuty.
Superkondenzátory mají své specifické vlastnosti, v něčem jsou lepší než jakékoli dnes známé akumulátory, v něčem horší. Nemá smysl považovat je za něco, co „spasí“ techniku, oprostí nás od závislosti na toxických nebo omezeně dostupných surovinách používaných k výrobě akumulátorů nebo dokonce jednou pro vždy vyřeší problém uchování elektrické energie z obnovitelných zdrojů. To nejde, alespoň zatím ne, a nepůjde to ani v nejbližší budoucnosti. Má ale smysl se superkondenzátory počítat a začít je běžně používat, protože mohou změnit způsob konstrukce existujících zařízení, zjednodušit je, zlevnit a zlepšit jejich funkci.
Kat. 1