

Kterého konstruktéra by nelákala myšlenka využít při práci s krokovými motory mikrokrokování?
Vždyť mít možnost rozdělit 200 základních kroků o velikosti 1,8 úhlového stupně do dalších 256 poloh a získat tak 51 200 kroků na otáčku je na první pohled velmi lákavé.
Takže kde je háček?
Ve skutečnosti ovšem, jakmile začnete mikrokrokováním zvětšovat počet poloh motoru, značně rychle klesat točivý moment motoru, který se ho snaží nastavit do poloh, vložených mezi jednotlivé celé kroky. Celkový počet poloh, do nichž můžete motor nastavit se sice zvýší, ovšem přesnost polohování se kupodivu nejen nezvýší, ale možná naopak i sníží.
Na grafu vidíte, jak by měl vypadat ideální průběh pohybu rotoru mezi dvěma úplnými kroky. Jak ale ukazuje druhá křivka, jeho pohyb se od ideálu hodně liší. Na začátku se rotor z polohy, která odpovídá celému kroku pohybuje “neochotně” protože ho brzdí přídržný moment magnetického obvodu, způsobený remanentním magnetismem, a jakmile se rotor přibližuje k následující celé poloze, tak ho naopak tatáž magnetická síla urychluje. Na začátku cyklu jsou tedy skutečné mikrokroky kratší než by teoreticky měly být, na konci se naopak proti těm teoretickým prodlužují.
Protože se točivý moment motoru snižuje úměrně k tomu, jak se zvyšuje vzdálenost pólů rotoru a statoru a tím klesá okamžitý magnetický tok, nastupuje ještě skluz od ideální polohy, vyvolaný mechanickým zatížením rotoru.
Aby nebylo ještě dost potíží, tak pokud je frekvence krokování malá – tedy právě v okamžiku, kdy by mel rotor zaujmout přesnou stabilní polohu – začnou se dost výrazně uplatňovat mechanické rezonance motoru, způsobené mnoha vlivy, od velikosti zátěže a způsobu jejího připojení k motoru až po upevnění motoru k nosné konstrukci.
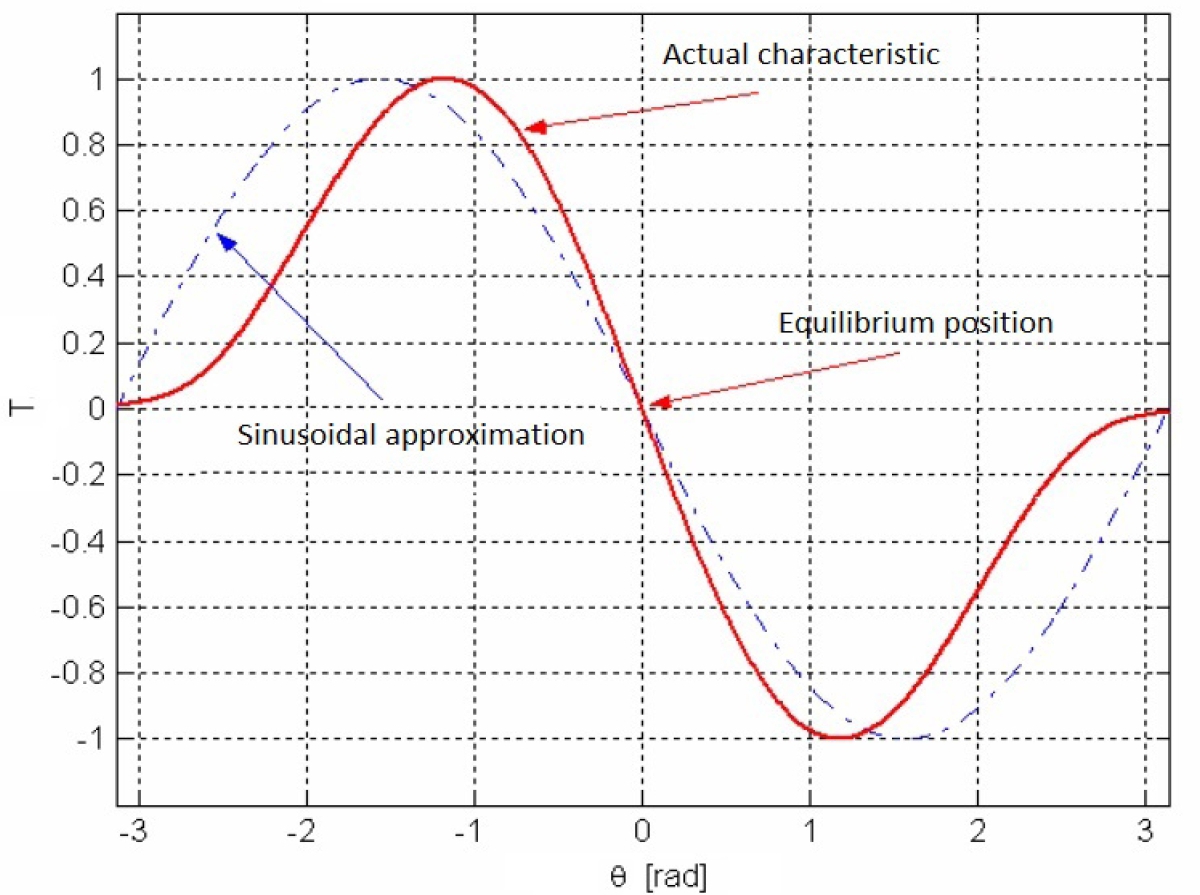
Čerchovaná čára: ideální poloha rotoru krokového motoru při pohybu mezi jednotlivými celými kroky. Červená čára: skutečná poloha rotoru.
A navíc, ačkoli drivery, které umožňující mikrokrokování se používají už dlouho, přesto málokterý z nich dokáže při tomto způsobu buzení motoru na svém výstupu produkovat průběh alespoň vzdáleně se podobající tomu ideálnímu.
Točivý moment pro jeden mikrokrok:
[1] TINC = THFS x sin (90/µPFS)
Přírůstek točivého momentu pro N mikrokroků:
[2] TN = THFS x sin ((90 x N)/µPFS))
V rovnicích 1 a 2 se režim full-step považuje za jeden mikrokrok, režim half-step za dva mikrokroky.
| Symbol | Definice | Jednotky |
| µPFS | Počet mikrokroků na jeden plný (full) krok | bezrozměrné |
| N | Počet již vykonaných mikrokroků mezi dvěma celými kroky(N musí být méně nebo rovno µPFS) | bezrozměrné |
| THFS | Točivý moment při celokroku (full-step) | Nm |
| TINC | Přírůstek točivého momentu na mikrokrok | Nm |
| TN | Přírůstek točivého momentu pro N mikrokroků(N musí být méně nebo rovno µPFS) | Nm |
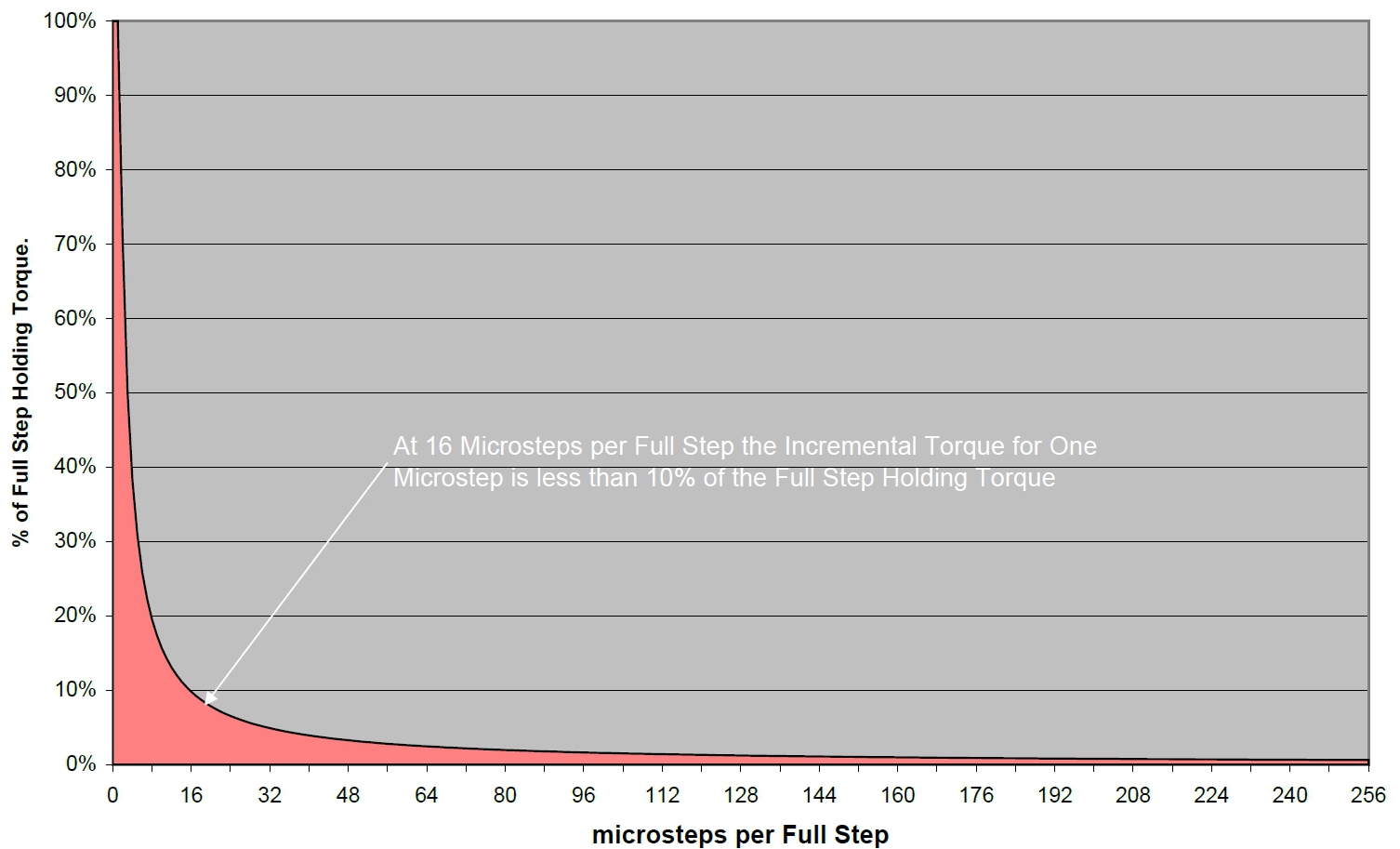
Tabulka 1 znázorňuje, jak rychle se snižuje přídržný moment motoru při zvětšování počtu mikrokroků.
| Počet mikrokroků na jeden plný krok | Velikost točivého momentu, vztaženého k celokroku [%] |
| 1 | 100,00% |
| 2 | 70,71% |
| 4 | 38,27% |
| 8 | 19,51% |
| 16 | 9,80% |
| 32 | 4,91% |
| 64 | 2,45% |
| 128 | 1,23% |
| 256 | 0,61% |
Co z to vyplývá?
Důsledkem toho je, že v případě, že pokud je točivý moment, potřebný k provedení kroku větší, než točivý moment, který může motor mezi dvěma mikrokroky vyvinout, nezačne se motor otáčet okamžitě, ale až tehdy, když proběhne několik dalších mikrokroků a točivý moment vzroste natolik, že překoná mechanické odpory a odpor zátěže.
Pokud má motor mezi jednotlivými kroky malý točivý moment, má též malý moment přídržný; síly vznikající na zátěži ho mohou tedy snadno vychýlit z přesné polohy a nekontrolovaně ho strhnout dokonce až do polohy, odpovídající nejbližšímu celému kroku.
A to ještě není vše – pokud budeme motor reverzovat, pak se k mechanickým odporům připojí ještě setrvačné síly rotoru a připojené zátěže a okamžitá odchylka od přesné polohy tak ještě vzroste.
Vyplývá z toho tedy především to, že přesná poloha motoru mezi jednotlivými celými kroky je nejistá a předem neodhadnutelná. Pro přesné dodržení žádané polohy je nutné, aby motor svůj pohyb začínal a končil vždy v poloze, odpovídající celému kroku.
Dosažitelná přesnost polohy a rozlišení
Ale co když motor není zatížen?
I nezatížený krokový motor musí stále překonávat odpor ložisek a především přídržnou sílu, která se ho snaží udržet v poloze, odpovídající celému kroku. A tato přídržná síla není nikterak zanedbatelná, činí 5 až 20 % momentu točivého. Naopak, když se rotor motoru konečně “utrhne” a začne se přibližovat k další poloze celého kroku, bude se tato přídržná síla přičítat k momentu točivému a tentokrát tedy bude rotor naopak do další celé polohy přitahován. A součet všech těchto sil má neblahý vliv na přesnou rotoru motoru mezi jednotlivými celými kroky.
Výrobci jsou si dobře vědomi těchto vlastnosti a někteří z nich vyrábějí motory, které jsou pro mikrokrokování přímo určeny (ale nehledejte je, prosím, mezi desetidolarovými motory z Číny). Tyto motory mají skutečně lepší polohovou přesnost mikrokroků, ovšem daní za to je značné snížení statického přídržného momentu, což znamená, že takové motory jsou určeny jen pro běh s velmi malou a navíc pokud možno neměnnou zátěží.
Možná vás napadá, že výše zmíněným problémům by se dalo předejít tím, že magnetický tok, generovaný mikrokrokovacím driverem nebude sledovat přesně sinusový průběh, ale jeho průběh bude popsán jakousi tabulkou, v níž budou uloženy potřebné parametry pro každý jednotlivý mikrokrok. Ano, je to možné, ovšem jen pro jeden určitý typ zátěže motoru. Jakmile se tato zátěž změní, přesnost mikrokrokování se nejspíš zhorší ještě více, než kdyby bylo použito standardní nastavení driveru.
Kdy tedy mikrokrokování použít?
Pokud potřebujeme:
- Snížit mechanický hluk.
- Přesně řídit malé polohovací mechanismy
- Zmenšit pravděpodobnost rezonancí
Stručně řečeno, i když mikrokrokování zvyšuje počet kroků na otáčku, v žádném případě nezvýší přesnost polohování. Jeho skutečným přínosem je snížení mechanických a magnetostrikčních hluků, hladší běh motoru a výrazné snížení rezonancí. To vše dohromady zmenšuje pravděpodobnost výpadku kroku a tím ztráty synchronizace systému, který pracuje v otevřené smyčce. Hladší chod motoru se projeví také menším opotřebení celé mechanické přenosové soustavy.