

Dnes si povíme něco o ovládání krokových motorů pomocí Arduina/Merkurina 01.
Co k tomu potřebujete:
Merkurino 01
bipolární krokový motor („ten se 4 dráty“)
modul pro ovládání krokových motorů – driver A4988 step+dir
propojovací vodiče
napájecí zdroj
Jak to funguje:
Určitě jste si všimli, že příklady v Arduinu obsahují návody Stepper – speed control a další.
To je určeno pro zapojení, kdy je motor zapojen přes dvojitý můstek (H-bridge) a procesor řídí taktování jednotlivých cívek přímo.
Na internetu najdete nejčastěji nabídku můstku s obvodem L298, který však přes ujišťování prodejců není vhodný pro běžné motory typu Nema17, protože nemá zpětnou vazbu pro snímání proudu. Důsledkem je velká tepelná ztráta na chladiči a motoru a velký příkon.
Moderní zapojení využívá obvody se zpětnou vazbou, které se řídí pouze dvěmi signálními vodiči – step a dir. Dobře dostupný je obvod A4988 na malé desce s 2×8 piny, vhodný na pokusy v nepájivém poli.
Step je krok, Dir je směr. Takže stačí jen dokola posílat LOW a HIGH na vstup Step a pomocí Dir přepínat směr.
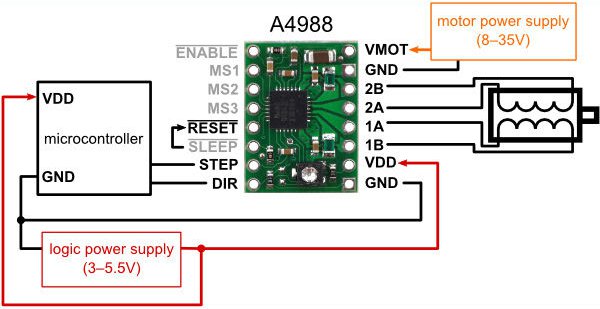
Schema zapojení:
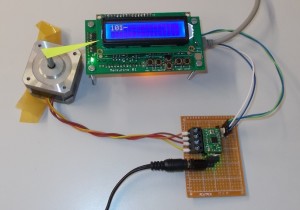
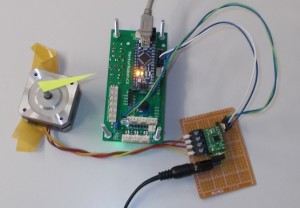
 Příklad zapojení:
Příklad zapojení:
Program, který jednou otočí motorem tam a vrátí se do stejné pozice:
//základní zapojení Arduino/Merkurino 01 a modulu s A4988:
//spojit dohromady reset a sleep
//spojit VDD k Arduino 3.3v nebo 5v
//spojit GND k Arduino GND (GND near VDD)
//spojit 1A a 1B k stepper cívce 1 (nutno ověřit, jinak dojde ke zničení A4988)
//spojit 2A a 2B k stepper cívce 2
//spojit VMOT k napájení ( +8 až +35V )
//spojit GRD k GND - zemi ( 0V )
//Jednoduché použití LiquidCrystal knihovny
#include <LiquidCrystal.h>
// použité piny pro Merkurino 01 LCD panel
LiquidCrystal lcd(13, 12, 8, 7, 4, 2);
// definice proměnných
int stp = 3; // 13; // spojit pin 13 k step
int dir = 5; // 12; // spojit pin 12 k dir
int a = 99; // čítač kroků
int pauza = 10; // pauza mezi kroky motoru [ms]
int pauza1 = 2000; // pauza mezi otočením směru [ms]
void setup()
{
pinMode(stp, OUTPUT); //
pinMode(dir, OUTPUT);
digitalWrite(dir, LOW);
lcd.begin(16, 2); // start LCD library
}
void loop() //loop-----------------------------
{
otvirat();
delay(pauza1);
zavirat();
delay(pauza1);
} //konec loop---------------------------
void otvirat() // otvirat ----------------------
{
digitalWrite(dir, HIGH); //nastavení směru otáčení
for ( a = 100; a < 300; a++)
{
digitalWrite(stp, HIGH);
delay(pauza);
digitalWrite(stp, LOW);
delay(pauza);
lcd.setCursor(0,0);
lcd.print(a);lcd.print("+");
}
} //konec otvirat----------------------
void zavirat() // zavirat ----------------------
{
digitalWrite(dir, LOW); //nastavení obráceného směru otáčení
for (int a = 300; a>100; a--)
{
digitalWrite(stp, HIGH);
delay(pauza);
digitalWrite(stp, LOW);
delay(pauza);
lcd.setCursor(0,0);
lcd.print(a);lcd.print("-");
}
} //konec zavirat----------------------
S Merkurinem 01 se můžete podrobněji seznámit na setkání „CNC a robotika amatérsky„.