

Následující stručně popsaná konstrukce Robrouka „model Super C“ napájená výhradně superkondenzátory může být příkladem aplikace a inspirací pro vlastní pokusy. Spolu s dalším příkladem, který bude následovat, reprezentují dva přístupy k problému. Oba jsou možné a funkční, ale samozřejmě mají svoje výhody a nevýhody. Protože v tomto případě jde především o napájení, ne „chytrost“ programu, nebudeme se podrobně zabývat algoritmem řízení.
Cílem bylo postavit menší jednoduchý sledovač čáry s co největší, až zbytečně velkou dobou chodu na jedno nabití. Základ podvozku tvoří Robrouk s původními motory Pololu1124 a koly Pololu1422. Rozměrná kovová vrchní deska byla odstraněna (vylehčení) a malé kontaktní pole nahrazeno dvojnásobně velkým, aby bylo dost prostoru i na složitější pokusy. Ve výsledku tak velké pole není nutné, stačilo by i původní. Spolu s kovovou základnou byla odstraněná i opěrná nožka s kuličkou a později nahrazena smyčkou ohnutou z měděného instalačního drátu v PVC izolaci (průřez 2,5 mm²). Kontaktní pole je ke konstrukci přilepené pomocí kvalitní oboustranně lepicí pásky.
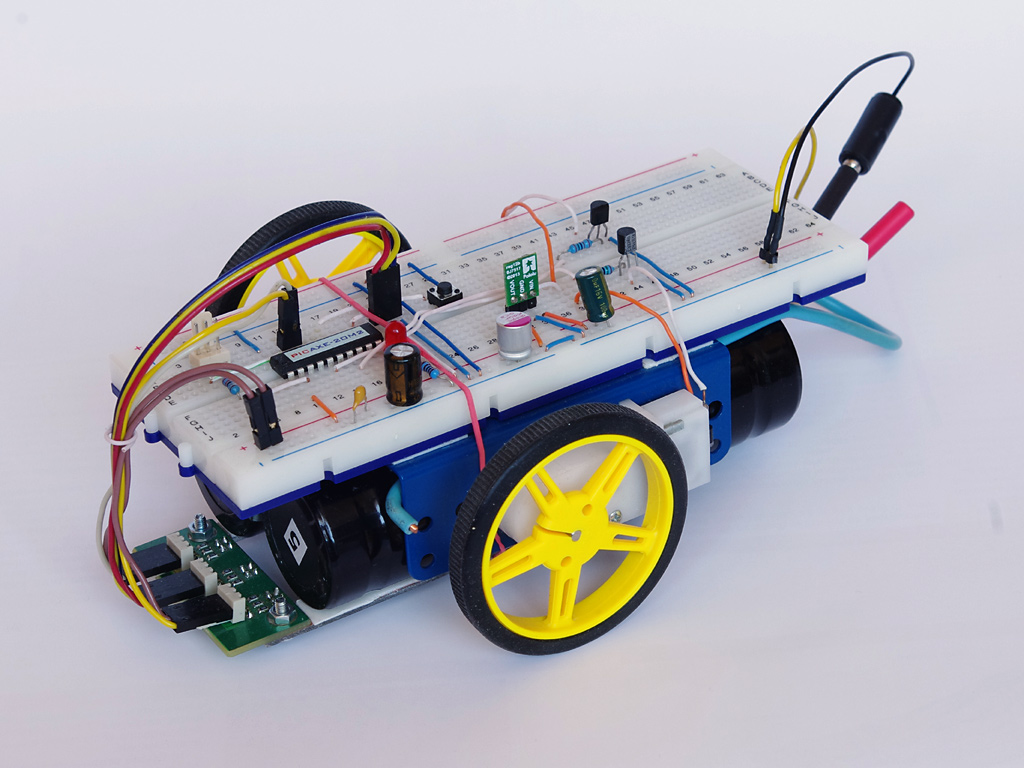
Celkový pohled na Robrouka „model Super C“
Vpředu je umístěný trojitý reflexní IR snímač s čidly QRD1114, jeho deska je přišroubována na dva držáčky a ty nalepené páskou zespodu na kondenzátory. IR LED snímačů jsou trvale napájeny.
Místo baterií nebo akumulátorů jsou použité čtyři paralelně spojené kondenzátory Samwha se jmenovitou kapacitou 500 F, které se přesně vešly do podvozku. Výsledný složený kondenzátor tedy má mít 2000 F / 2,7 V, ovšem reálná kapacita (jak se ukázalo mimotolerančních součástek) je podstatně nižší, jen 1526 F.
Tato volba koncepce vyšla ze vzájemných vztahů řízení, pohonu a napájení. Motory Robrouka velmi dobře pracují už při napětí 3 V, jako řídící obvod slouží PICAXE 20M2, který pracuje od 1,8 V. Napětí 3,3 V lze snadno získat z napětí kondenzátoru 1 – 2,7 V spínaným zvyšujícím měničm Pololu #2563. Hotový robot má hmotnost 596 g.
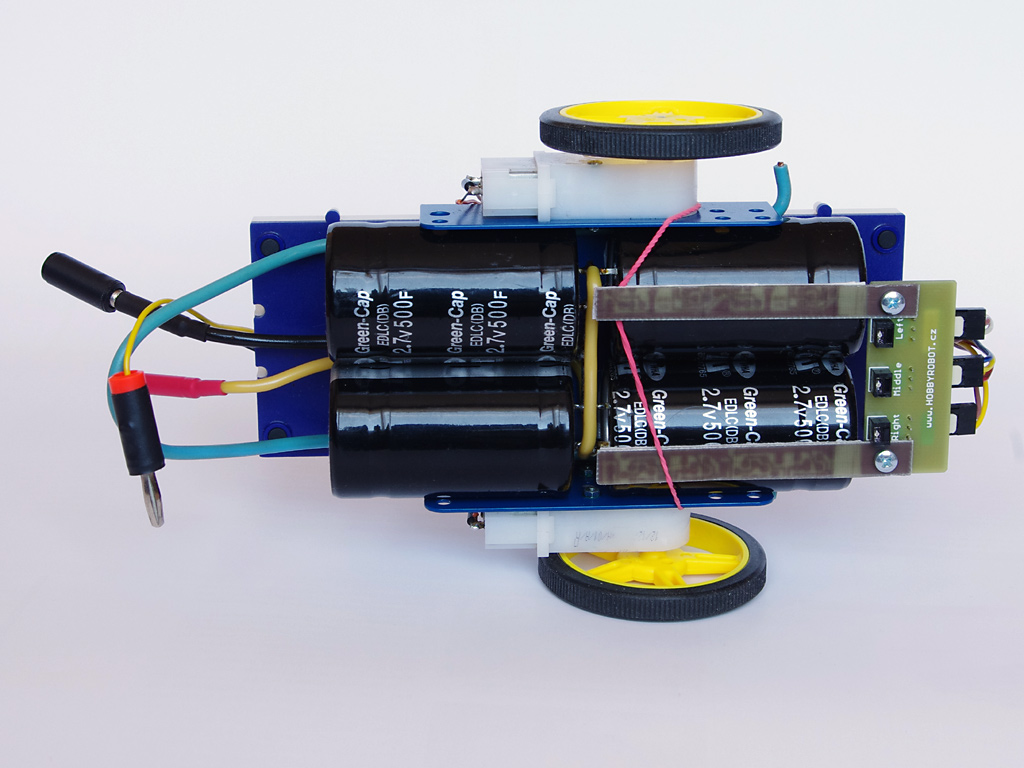
Pohled zespodu na kondenzátory a IR čidla
Vývody kondenzátorů jsou na zlacené zdířky typu G4 a do těchto zdířek se připojují i banánky napájecího (tenkého) kabelu, který funguje současně jako hlavní vypínač. Vypadá to podivně, když silné kabely (2,5 mm²) v silikonové izolaci navazují na tak tenké vodiče, ale musíme si uvědomit, že při nabíjení stejnými zdířkami teče proud až několik desítek ampérů, tyto silové vodiče jsou téměř poddimenzované!
Jako palubní napětí je zvoleno 3,3 V a to společné pro pohon i mikrokontrolér, což je sice proti zvyklostem a zásadám bezpečnosti (robustnosti), ale když je měnič na výstupu podpořen polymerovým kondenzátorem 560 μF/ 6,3 V s velmi malým sériovým odporem a samozřejmě i běžným keramickým kondenzátorem 100 nF, tak rušení od motorů nedělá mikrokontroléru (který má rezervu a chodí i při pohlesu napětí o 1,5 V) žádné problémy. Polymerový kondenzátor je zde nutný, standardních „Low ESR“ kondenzátorů by muselo být použito pro stejný efekt několik!
Měnič po většinu doby pracuje v příznivém režimu, protože jeho vstupní napětí není menší než ½ výstupního napětí, jen v závěru vybíjení se zhoršuje jeho účinnost. Velkou výhodou této koncepce je to, že nijak nemusíme řešit balancování ani hlídání meze vybití nebo přepólování jednotlivých kondenzátorů, nic z toho z principu nehrozí. Jediné, co je nutné ohlídat, je mez nabití kondenzátorů.
PICAXE 20M2 čte IR čidla pomocí AD převodníků, nicméně po kalibraci na daném povrchu a čáře při daném vnějším osvětlení vyhodnocuje jen dva stavy – bílý podklad / černá čára. Pro jednoduchost (spíše kvůli snížení ceny) jsou motory řízené jen každý jedním spínacím tranzistorem, takže robot nemůže couvat ani se otočit na místě, nejmenší zatáčku udělá, když poháněné kolo „oběhne“ kolem druhého zastaveného kola. To značně omezuje manévrovací možnosti, ale v tomto případě nejde o „chytré“ sledování čáry a schopnost například vytočit i ostré úhly, ale výhradně o to, aby se robot na jednoduché dráze udržel v chodu dlouho, a na to dané řešení stačí. Při napětí 3,3 V je také podstatné, aby úbytek napětí na spínacích polovodičích byl co nejmenší. Motory jsou ovládané pomocí PWM, nicméně po zkouškách je využíván v podstatě jen plný chod, chod na asi 70% a zastavení.
Pokud by někdo chtěl nahradit tranzistory dvojitým plnohodnotným H můstkem, musí vzít v úvahu, že elektronika musí pracovat s buzením logickým signálem na úrovních 3 V a současně i jejich výkonové části musí stačit 3 V, tomu vyhoví třeba modul DRV8835.
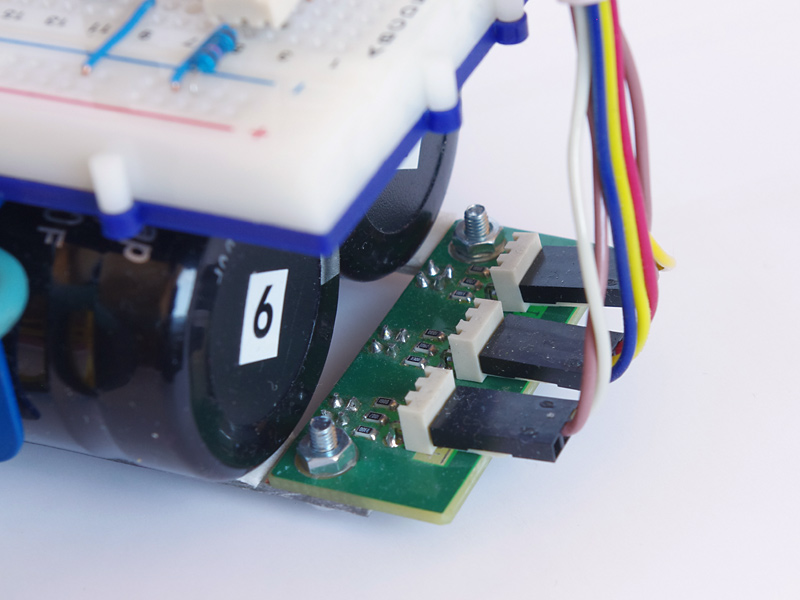
Detail IR čidel
Funkce robota je velmi jednoduchá, po zapnutí se rozbliká LED a čeká se na stisk tlačítka, po něm ještě program 1 s počká a pak jede a sleduje čáru (plný chod při čáře jen pod středním čidlem). Když vybočí, ať už částečně (čára pod středním a krajním čidlem) nebo výrazněji (čára jen pod krajním čidlem), kolo na vnitřní straně zatáčky se zastaví. Pokud se detekuje jiná možnost (zejména všechna čidla vidí bílou nebo černou barvu), pokračuje se po jistou dobu (asi 2 s) v posledním platném směru, to umožní sledovat i čáru, která uhnula v pravém úhlu a pak zmizela z dohledu. Stiskem tlačítka se robot zastaví. Robot se sám zastaví a rozbliká LED, když napájecí napětí klesne pod 1,0 V. Reálně by šlo „vyždímat“ z kondenzátorů ještě asi 5% energie, ale není žádoucí provozovat měnič v nevýhodném režimu, kdy je výstupní napětí zhruba 4x větší než vstupní.
Jak se podařilo splnit záměr? Doba nepřetržitého chodu na dráze na jedno nabití je kolem 70 minut, přitom se spotřebuje 85% energie obsažené v kondenzátorech (do meze 0,9 až 1,0 V), zbytek zůstane uložen pro další cyklus a nemůže se vyčerpat jen kvůli malému napětí. Doba chodu myslím dostatečně demonstruje použitelnost tohoto pohonu i možnost krátkého nabíjení. Napájecí napětí je po celou dobu jízdy konstantní stejně jako rychlost.
Nabíjení je trochu problematické. Aby šlo zvládnout opravdu v krátké době, musel by se použít speciální nabíječ. Každý z použitých kondenzátorů Samwha (které NEJSOU určeny pro vysoké nabíjecí a vybíjecí proudy) zvládá s rezervou nabíjecí proud 12 A, čtveřice dohromady 48 A. Nabíječ by tedy musel být schopen dodávat tento proud a současně ohlídat napětí 2,7 V (s přesností kolem 0,01 V). Není to technický problém, stačí koupit síťový spínaný zdroj 3,3 V / 50 A, snížit nepatrně jeho napětí a doplnit omezení proudu reagující dřív než ochranná pojistka. Plného nabití z nuly lze dosáhnout za 90 sekund, tedy za 1,5 minuty. Při nabíjení laboratorním zdrojem to trvá přiměřeně déle, konkrétně malým zdrojem 2,2 A to nejde rychleji než za půl hodiny, ale je to jen otázka dimenzování zdroje.
V příštím, již posledním dílu, se podíváme na poněkud masivnějšího robota.
Kat. 1