
Vrátíme se k tématu trochu většího servopohonu z minulého článku a jeho ovládání například mikrokontrolérem PICAXE, tentokrát ve verzi, která využívá dvě relé a dovoluje mít napájecí ohruh serva galvanicky oddělený od řídících obvodů.

Servopohon LACT12P-12V-20
Servopohon je stejný, k ovládání použijeme jeden modul AXEBoard08 a dva moduly s relé. Nejprve budeme polohu serva ovládat ručně potenciometrem.
Releový modul ná tři vstupní piny: zem, napájecí napětí +5V a řídící signál. Relé sepne, když je řídící signál ve stavu L, odpadne ve stavu H, vinutí relé je spínáno přes tranzistor. Spotřeba jednoho modulu v sepnutém stavu je 60 – 70 mA. Napájení modulu indikuje červená LED, sepnutí zelená LED. Relé obsahuje jeden přepínací paket kontaktů dimenzovaných na zatížení proudem 10 A. Zapojení vývodů je popsáno na spodní straně desky modulu.
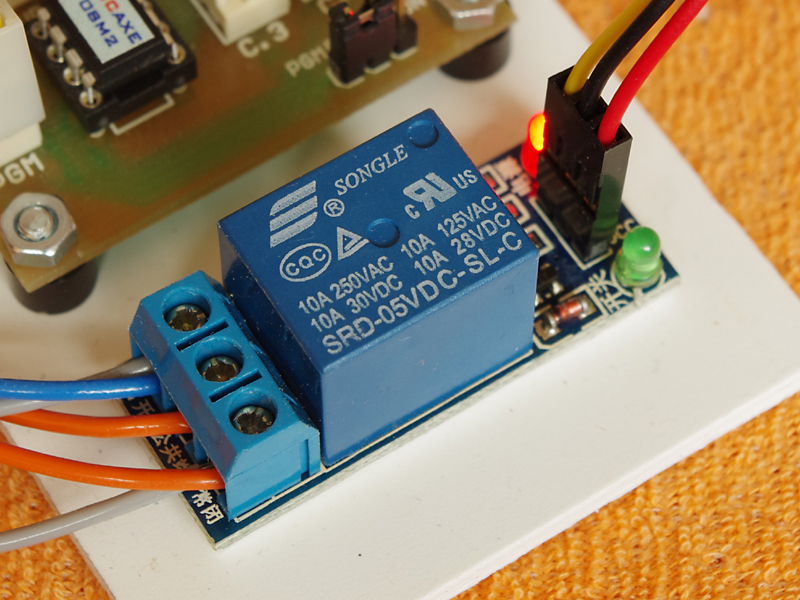
Modul s relé
Propojení modulů pro ovládání potenciometrem
Program pro PICAXE 08M2 je následující:
rem maxiservo se dvema rele rem c.0 a C.4 rele aktivni v L (!) rem c.2 ADC ovladaci potenciometr rem c.1 ADC zpetnovazebni potenciometr #picaxe 08M2 #no_data do ;smycka programu readadc c.2,b0 ;cteni ovladaciho potenciometru readadc c.1,b1 ;cteni polohy serva if b0>b1 then ;pro jeden smer b2=b0-b1 ;zjisti odchylku if b2>1 then ;kdyz je vetsi nez 1 (pasmo necitlivosti) high c.0 ;zapni motor v jednom smeru low c.4 else ;kdyz ne high c.0,c.4 ;vypni motor endif endif if b0<b1 then ;pro druhy smer pohybu b2=b1-b0 ;zjisti odchylku if b2>1 then ;kdyz je vetsi nez 1 (pasmo necitlivosti) low c.0 ;zapni motor v duhem smeru high c.4 else ;kdyz ne high c.0,c.4 ;vypni motor endif endif pause 50 ;prodleva aby rele nekmitala loop ;konec smycky
Bude-li napájení ovládání a motoru serva skutečně oddělené, bude servo fungovat správně. Můžeme pochopitelně obojí napájet i z jednoho zdroje, ale potom velmi záleží na tom, aby by l zdroj dostatečně tvrdý. I když motor serva odebírá při ustáleném pohybu jen asi 0,5 A naprázdno a nejvýš 2 A při zatížení, při rozběhu je to jinak a projde proudový pulz několikanásobně většího odběru. Je-li zdroj měkký, může klesnout napětí do té míry, že PICAXE vypadne a resetuje se, to se může cyklicky opakovat. V takovém případě se servo trhaně rozjede v jednom směru a relé kmitají.
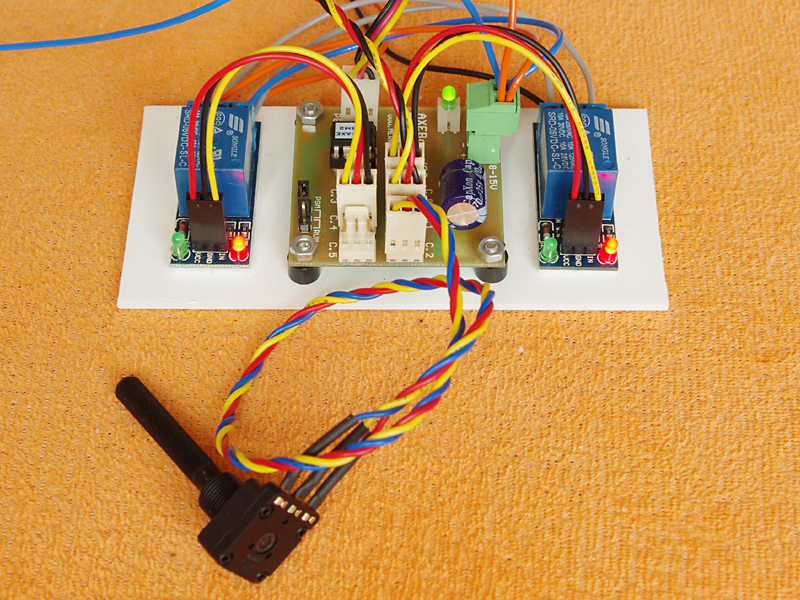
Sestava modulů pro ovládání serva potenciometrem
Pokud napájíme servo (i řízení) třeba z kvalitního olověného akumulátoru, problémy nehrozí, stejně tak při použití tříčlánku Li-pol. Jestliže k napájení použijeme síťový zdroj, pak tento zdroj musíme dimenzovat ne na 2 A, ale nejméně na 10 A, případně můžeme jeho výstup posílit elektrolytickými kondenzátory s kapacitou v řádu desítek až stovek mF, což je lepší. Při vypnutí relé indukčnost vodičů a motoru vygeneruje přepěťový pulz, který bez kondenzátoru může síťový zdroj ohrozit a může i „projít“ k mikrokontroléru a způsobit jeho „zakousnutí“.
Druhé zapojení používá k řízení standardní signál pro modelářská serva. Zapojení je obdobné, program také, vyhodnocuje se šířka pulzu.
Propojení modulů pro ovládání servopulzy
rem maxiservo rizene servopulzy
rem c.0 a C.4 rele aktivni v L (!)
rem c.2 vstup servopulzu
rem c.1 ADC zpetnovazebni potenciometr
#picaxe 08M2
#no_data
do ;smycka programu
pulsin c.2,1,b0 ;cteni servopulzu
if b0<100 then let b0=100 endif ;nekorektni pulzy
if b0>200 then let b0=200 endif ;nekorektni pulzy
b0=b0-90*2 ;konverze na interval 10-210
readadc c.1,b1 ;cteni polohy serva
if b0>b1 then ;pro jeden smer
b2=b0-b1 ;zjisti odchylku
if b2>2 then ;kdyz je vetsi nez 2 (pasmo necitlivosti)
high c.0 ;zapni motor v jednom smeru
low c.4
else ;kdyz ne
high c.0,c.4 ;vypni motor
endif
endif
if b0<b1 then ;pro druhy smer pohybu
b2=b1-b0 ;zjisti odchylku
if b2>2 then ;kdyz je vetsi nez 2 (pasmo necitlivosti)
low c.0 ;zapni motor v druhem smeru
high c.4
else ;kdyz ne
high c.0,c.4 ;vypni motor
endif
endif
pause 100 ;prodleva aby rele tolik nekmitala
loop ;konec smycky
Toto řízení je funkční, nicméně se zjednodušeným výpočtem na ukázku, nevyužívá celou mechanickou dráhu serva. Relé musí být kvalitní aby se jejich kontakty příliš neopalovaly a nezůstávaly „viset“.