

Tentokrát se opravdu vydařilo. Posuďte sami.
Mnoho účastníků se od začátku oprávněně chlubilo svými výtvory:
-

- Ultrazvukový dálkoměr
-

- H-můstek z diskrétních součástek
-

- Všehochuť…
-

- Malý 3D manipulátor
-

- Program pro ovládání modelového kolejiště
-
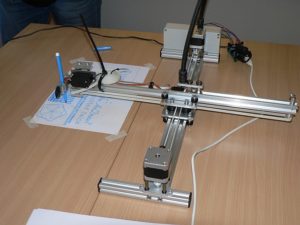
- Plotr H-plot
V průběhu celého Robodoupěte pochopitelně probíhaly i neformální konzultace a diskuze:
-

- Tohle všecho je moje…




-

- To je on…

-

- Jo takhle…
Ale největší zájem vzbudila Martinova přednáška o „multitaskingu“ na Arduinu.
-

- Na tomhle vánočním stromečku byl mutitasking prezentován
-

- Vypadalo to, že přednáška bude krutopřísná…
-

- … ale nakonec ji všichni ve zdraví přežili
Vše, podstatné co v Martinově přednášce zaznělo, naleznete zde.
Na tomto Robodoupěti byly představeny dvě novinky:
Plotr H-plot
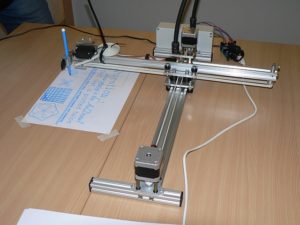

který je možno přes odpovídající řídící desku ovládat přímo z kreslícího programu Inkscape (samozřejmě s příslušným pluginem), ale je ho možno řídit třeba Arduinem s nahraným programem GRBL a vytvořit z něj malý CNC stroj, zpracovávající G-kódy. V tomto režimu pak může H-plot nést třeba laser a vyřezávat drobné díly z papíru nebo tenkého plastu.
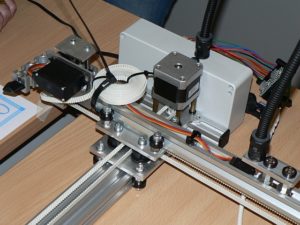
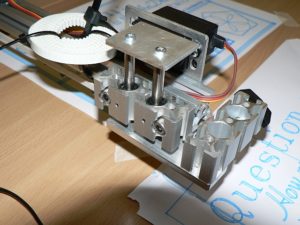
Robotický manipulátor
vyrobený z miniaturních hliníkových konstrukčních profilů
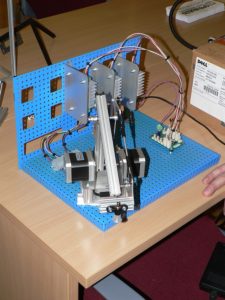
-

- Jako pracovní část používá vakuový uchopovač, který byl v tomto případě odpojen a zůstala z něj jen přísavka.
-

- Robot je řízen přes tři drivery s obvody TB6600 a jednoduchý demo program běžel v PICAXE 14M2
-

- Jak celý program dopadne záleží jen na rozmaru tohoto pána :-))
Tento robot není primárně určen jako finální výrobek, ale bude se na něm odlaďovat řídící program pro větší robot, který bude též poháněn krokovými motory a zároveň je příkladem konstrukce z výše zmíněných profilů.
Všem účastníkům děkujeme a už se můžete začít těšit na další Robodoupě, které proběhne 7. ledna 2017.