

Na čínských webech lze narazit na velmi levné RC soupravy s cenou menší než 400 Kč. Celá řada ne-modelářů neví, co si pod takovou soupravou představit.
Na záříjovém Robodoupěti jsem ukazoval použití levné čínské RC soupravy (ta moje se jmenovala Dilwe KTH-91803G-VT, což nic neznamená). Celou řadu lidí použití zaujalo a ukázalo se, že celkem velké množství lidí neví, co od takového zařízení mohou čekat.
![]()
První, co je potřeba si ujasnit je, jestli je součástí dodávky vysílač i přijímač. V případě těchto levných kousků skoro vždy je. Tyto kousky používají různé metody komunikace a je velmi běžné, že jednotlivé modely mezi sebou nejsou kompatibilní.
Takže v krabici máme vysílač a přijímač. Pro rádia pracující na kmitočtu 2,4 GHz je obvyklé, že vysílač s přijímačem komunikují na datové úrovni. Proto je nutné v rámci prvního zapnutí provést takzvané párování. Párování není složitý proces. Pro tento model je na přijímači tlačítko, to stiskneme a zapneme přijímač. Indikační LED se rozbliká. Stále držíme tlačítko a zapneme vysílač, LED se rozsvítí a to je vše. Tím došlo ke spárování vysílače a přijímače. Málokdy je možné, aby byla vytvořena skupina několika přijímačů poslouchajících stejný vysílač ve stejném čase. Přijímač a vysílač pak zůstanou spárované do doby, než je spárujeme do jiné sestavy. Postup párování se může pro jiné modely lišit, ale bývá velmi podobné.
Z pohledu Robodoupěte považuji za užitečné si vysvětlit, co najdeme na pinovém konektoru přijímače. Budu předpokládat, že většina čtenářů ví, jak vypadá řídící signál pro modelářské servo (kdo neví, přečte si první kapitolu například z TOHOTO článku, koho zajímají podrobnosti, doporučuji video od Člověka Tvořivého – Homo Faciens). Abychom se dostali o něco hlouběji, podívejme se, jak pracovaly staré RC soupravy. Vysílač má na sobě několik potenciometrů, každý reprezentuje jeden kanál. Ve vysílači je nějaký kodér, který prochází jednotlivé potenciometry, změří hodnotu jejich odporu (zpravidla pomocí kondenzátoru vytvoří RC článek a převede odpor na čas v rozsahu 0 – 2 ms. Čas ze zpravidla měřil astabilním klopným obvodem, případně variantou založenou na NE555. Po změření času (jedna „půlvlna“) došlo ke vložení druhé půlvlny konstantní šířky 0,5 ms. Po změření posledního potenciometru se klopný obvod zastavil a byl znovu resetován a spuštěn jiným klopným obvodem s frekvencí cca 50Hz (20 ms). Tím vznikne sériový binární signál, který je jednoduché odeslat pomocí rádiového spoje. Tento signál se označuje jako PPM (Pulse Position Modulation) signál.

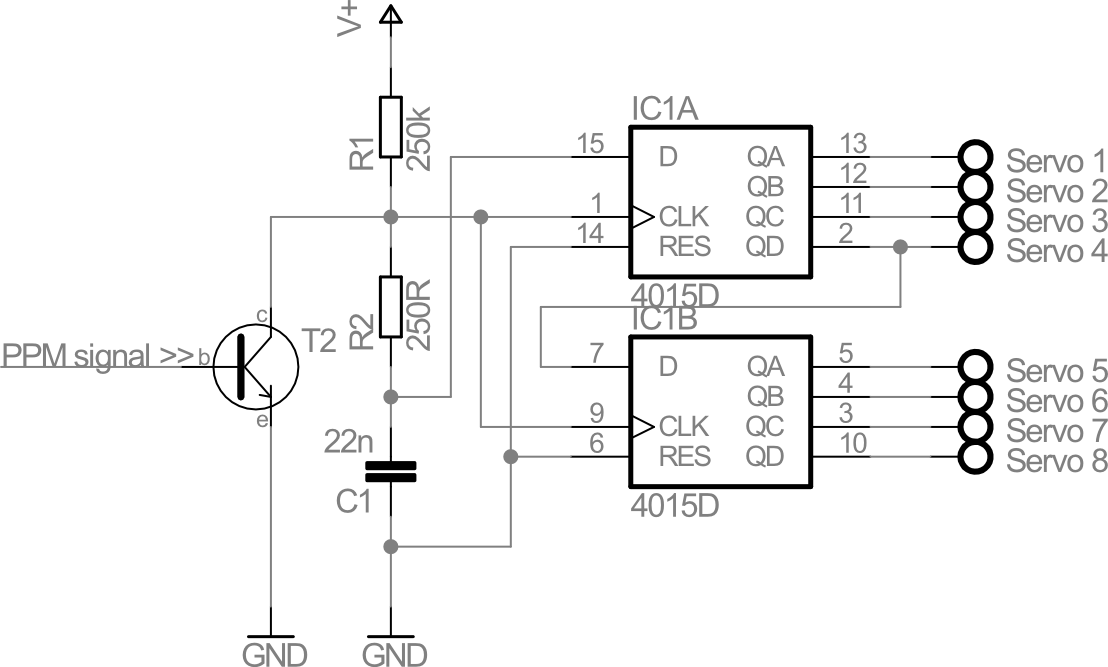
Tento signál je přenesen k přijímači a tam dekódován. Přenosovou cestou nemá cenu se zabývat, jen si přiblížíme dekódování. Původně se používali dva základní principy. Oba jsou velmi podobné. Jeden je založený na posuvném registru (tradičně CMOS 4015, někdy 74138). Signál se přivedl na vstup tranzistoru, který přemosťuje kondenzátor v RC článku a zároveň na hodinový vstup posuvného registru.
Druhý princip využívá čítače/děliče CMOS 4017. Každý pulz znamená přičtení, dlouhý pulz znamená reset čítače, tedy signál pro první kanál. Signál na RC článku odpovídá následujícímu obrázku:
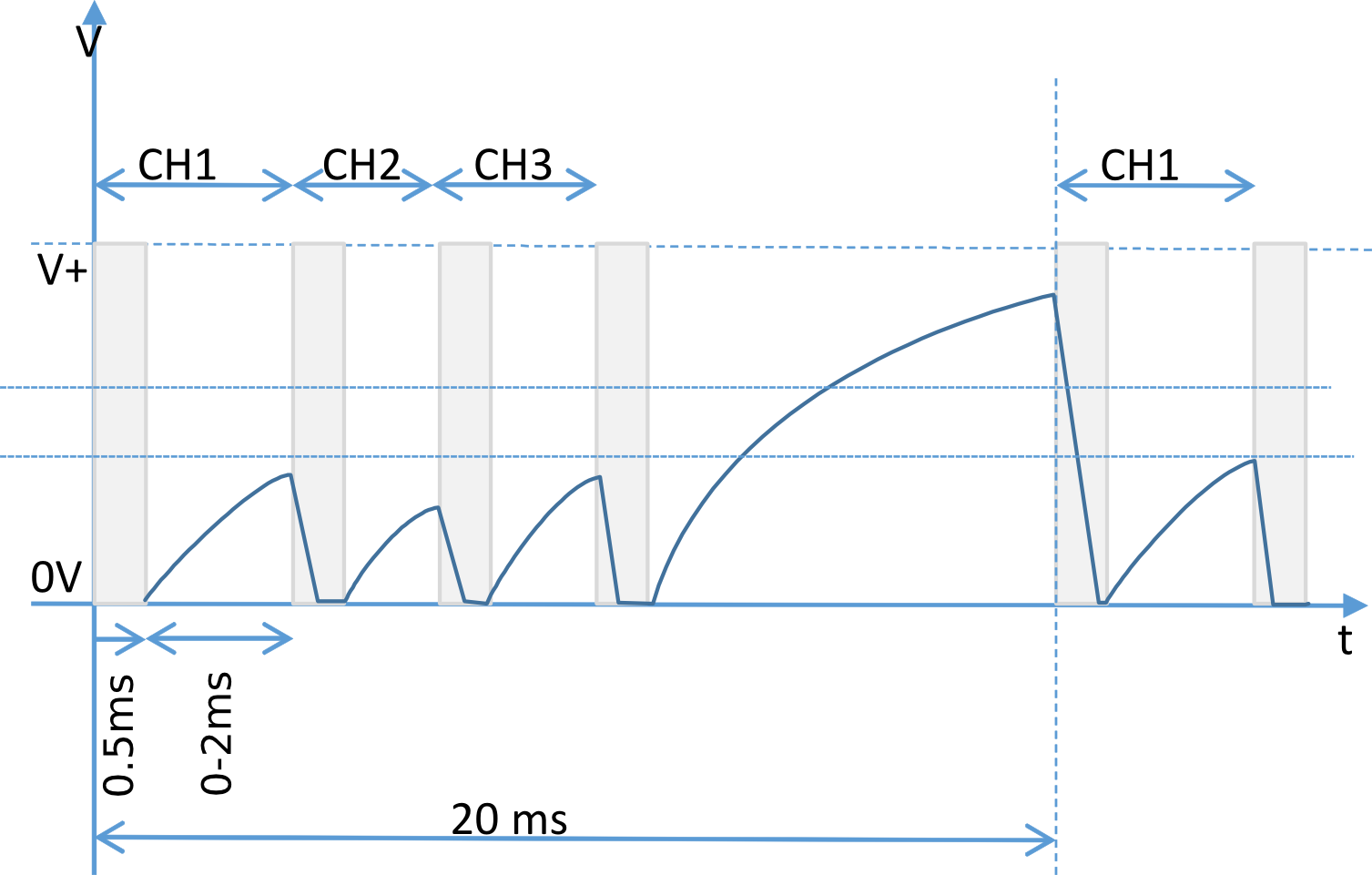
Při dlouhé mezeře se kondenzátor stihne nabít na úroveň logické 1, při krátké to nestihne (rozhodovací úroveň je vyznačená tečkovaně). Při delší mezeře se tedy na vstup posuvného registru (čítače) dostává logická 1, která prochází jednotlivé výstupy. Tím tedy dochází na každém z výstupů k vytvoření signálu, který se označuje jako PWM signál pro modelářské servo.

Dekodéry zapojené podle těchto schémat měli vždy velký počet kanálů. Reálně je počet kanálů omezen vysílačem a částečně R-C členem, který definuje konec sekvence.
V jednom ze schémat jsem se snažil zachytit také napájecí piny. Podstatné je zejména to, že všechny napájecí piny jsou paralelně propojeny a zároveň slouží k napájení vlastního přijímače. Většina přijímačů má krom běžných výstupů se signálem navíc ještě jednu řadu pinů, které se označují jako napájení (na schématu poslední řada). Nejsou ničím zvláštní, jedná se jen o pokračování řady propojených napájecích pinů. Někdy je přítomen i pin, který odpovídá signálovému pinu. Jeho úloha bývá různá. Často je nepřipojený, někdy je přímo propojený se sousedním signálovým výstupem, někdy se používá pro konfiguraci přijímače. Pokud tedy nemáte bližší informace, nic na něj nepřipojujte.
Z popisu je zřejmé, že RC přijímač má na svém výstupu několik výstupů pro modelářská serva (očekávaná zatížitelnost signálového výstupu může odpovídat CMOS logice). Všechny výstupy mají propojené napájení, ze kterého se zároveň napájí přijímač. Koncepce očekává model, který je poháněn spalovacím motorem, kde servo ovládá otáčky motoru (plyn) a druhé servo ovládá natočení kol. Žádné elektrické výkonové prvky.
Také je vhodné se podívat, jak jsou jednotlivé prvky přiřazené na ovladači. Pro pistolové (autíčkové) ovladače je situace celkem jednoduchá. První kanál je vyhrazen ovládání směru; ovládá se tedy „volantem“. Druhý kanál je vyhrazen rychlosti; ovládá se tedy „spouští“ (plynem). Třetí a další kanály nejsou striktně přiděleny. Nejčastěji se pro třetí kanál používá tlačítko a pro čtvrtý přepínač.
Pokud je použito tlačítko, je obvyklé chování, že uvolněné tlačítko generuje 1 ms pulz, stisklé tlačítko generuje 2 ms pulz (servo vlevo, servo vpravo). Přepínač podobně, pokud má dvě polohy, je jedna poloha 1ms, druhá 2ms pulz, pokud má tři polohy, je prostřední poloha 1,5 ms pulz (servo uprostřed).
Možná se také hodí vědět, že délka servo pulzu a výchylka serva není nijak specifikovaná. Velmi často se setkáme s popisem, kdy máme při délce pulzu 1,0 ms výchylku 90° vlevo, při délce pulzu 1,5 ms máme výchylku 0° a při délce pulzu 2,0 ms máme výchylku 90° vpravo. To ale neplatí pro všechna serva. Naopak velmi oblíbená (nejlevnější) serva typu SG9 používají mnohem větší rozpětí času. Takže pro 1,0 ms a 2,0 ms mají výchylku zhruba ±45°. Výchylku ±90° mají až pro délku pulzu zhruba 0,5 ms a 2,5 ms.

Po zkušenostech s nejlevnější verzí takovéto RC soupravy mohu konstatovat, že funguje překvapivě dobře. Nutno poznamenat, že jí používám pro ovládání autíček a robotů, pohybujících se po zemi v dohledové vzdálenosti.