

Laskavostí kolegy aladina jsem mohl vyzkoušet MERKUR Pásový podvozek 01 fy Merkur Toys s.r.o. Nedalo mi to, a vytvořil jsem pro tento podvozek jednoduché infračervené dálkové ovládání, založené na mikrokontroléru PICAXE. Výsledky jsou překvapivě dobré.
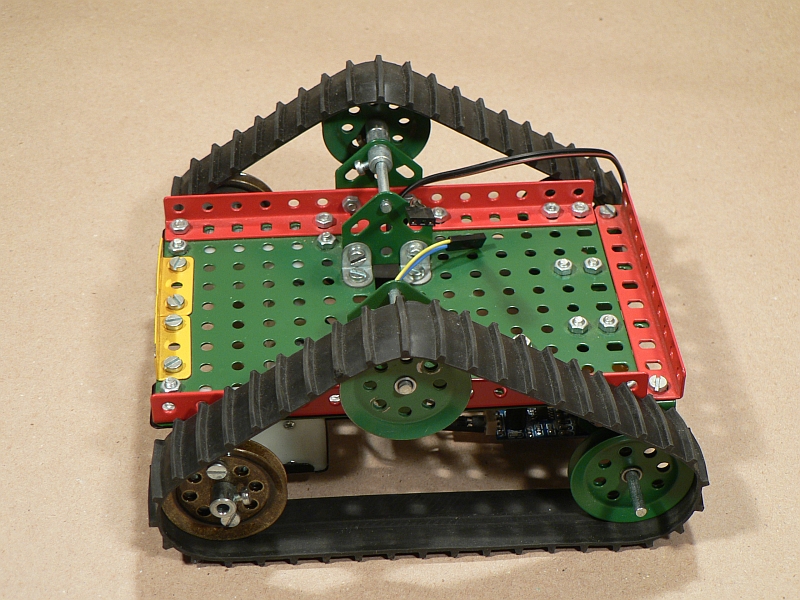
MERKUR Pásový podvozek 01
Schéma zapojení:

POZOR! ve schématu není zakreslen programovací obvod PICAXE, který je nutný pro správnou činnost.
V prototypu byla použita vývojová deska AXEboard20 osazená mikrokontrolérem PICAXE 20M2 a modul dvojitého driveru pro stejnosměrné motory s obvodem TB6612, zasunutý do miniaturního nepájivého pole, nalepeného na destičce ze stavebnice Merkur. Propojení mezi oběma díly je tvořeno kablíky s odpovídajícími konektory.
Na schématu není zakreslen programovací obvod pro PICAXE a nejsou tam ani odrušovací kondenzátory a stabilizátor 5 V, protože to vše je součástí desky AXEboard20.
Infračervený přijímač TSOP4838 je umístěn s okolními součástkami na malé pomocné destičce a v průběhu zkoušení jen volně „plandal“.
Program
je velmi jednoduchý, umožňuje ovládat směr jízdy, zatáčení vlevo a vpravo a zastavit:
#picaxe 20M2 #no_data do irin [200], C.3, infra select infra case 16 gosub vpred case 17 gosub vzad case 21 gosub stp case 19 gosub rot_R case 18 gosub rot_L endselect loop vpred: low b.6 high b.5 low b.4 high b.3 return vzad: low b.3 high b.4 low b.5 high B.6 return stp: high b.6 high b.5 high b.4 high b.3 return rot_L: low b.6 high b.5 high b.4 high b.3 return rot_R: high b.6 high b.5 low b.4 high b.3 return
Ovladač
Pro ovládání jsem použil univerzální dálkový ovladač UET610, nastavený do režimu Sony *) tlačítka pro ovládání hlasitosti ovládají zatáčení, tlačítka pro volbu programu ovládají směr jízdy a tlačítko POWER (zapnutí / vypnutí přístroje) podvozek zastavuje.
Pokud použijete jiný dálkový ovladač, bude nejspíše potřeba ve výše zveřejněném programu změnit kódy jednotlivých tlačítek. Zjistíte je snadno pomocí krátkého programu:
#picaxe 20M2 #no_data do irin [200], C.3, infra debug pause 500 loop
Program bude v debugovacím okně vypisovat aktuální hodnotu proměnné b13 (symbolické jméno infra), takže snadno zjistíte, jaký kód má které tlačítko vašeho ovladače.
Napájení
K napájení podvozku byl použit Li-Pol akumulátor 8,4V / 400 mAh, který překvapivě dokáže podvozek pohánět více než 30 minut. Vzhledem k to mu, že ho lze nabít obyčejnou nabíječkou pro mobilní telefony nebo přímo z USB portu, je pro takovéto aplikace velice vhodný. A navíc nezabírá místo, nejsou problémy s kontakty…
A takhle to dopadlo
 Pokračování příště… snad?
Pokračování příště… snad?
—
*) PICAXE umí pracovat jen s protokolem SIRC, který používají zařízení SONY.