

Při konstrukci strojů a přístrojů se často setkáváme s potřebou přesného polohování jejich pohyblivých částí. Použijeme‑li k pohonu stejnosměrné (DC) nebo střídavé (AC) motory, je přesné polohování bez použití koncových spínačů, enkodérů a často také brzdy nebo spojky obtížné. Proto se, zvláště v menších zařízeních, velmi často používají krokové motory.
Výhody krokových motorů…
- Úhel natočení hřídele je přímo úměrný počtu vstupních impulsů.
- Rychlost otáčení je úměrná frekvenci vstupních impulsů.
- Řízení v otevřené smyčce bez nutnosti polohové zpětné vazby.
- Rychlá a přesná reakce na zrychlení, zpomalení a změnu směru otáčení.
- Nekumulativní chyba polohování
(± 5% z kroku úhlu). - Velký točivý moment při nízkých rychlostech otáčení; není potřeba používat převodovky.
- Velký statický moment.
- Aretace v zastaveném stavu.
- Obousměrný provoz.
- Krokový motor může být přetížen a zastaven bez poškození.
- Vyšší životnost, protože motor nemá kartáčky a komutátor.
- Rotor je u většiny motorů uložen v přesných kuličkových ložiscích
… a jejich nevýhody
- Jsou při určitých rychlostech otáčení náchylné k rezonancím.
- Nejsou vhodné pro extrémě vysoké rychlosti otáčení.
- Pokud dojde ke ztrátě kroku, je ztracena poloha poháněného stroje a systém musí být znovu inicializován.
- Mají menší točivý moment než AC nebo DC motory srovnatelné velikosti.
Typy krokových motorů
Na první pohled se krokové motory liší pouze velikostí, hmotností a počtem drátů nebo pinů konektoru. V praxi se ale můžeme setkat se třemi základními typy.
Motor s proměnnou reluktancí

Toto je nejstarší konstrukce motoru, se kterou se dnes již setkáme málokdy.
Rotor tohoto typu motoru tvoří pouze svazek plechů s pólovými nástavci, nalisovaný na hřídel (rotor je bez vinutí). Stator tvoří taktéž svazek plechů s pólovými nástavci, na nichž jsou uložena vinutí jednotlivých fází. Motor má v poměru ke své velikosti a hmotnosti malý točivý moment a je vhodný jen pro aplikace, které nevyžadují velkou přesnost polohování.
Tento typ motor nejsnáze poznáme podle toho, že rotor se při protáčení rukou prohybuje plynule, bez znatelného „krokování“.
Motor s rotorem tvořeným permanentním magnetem
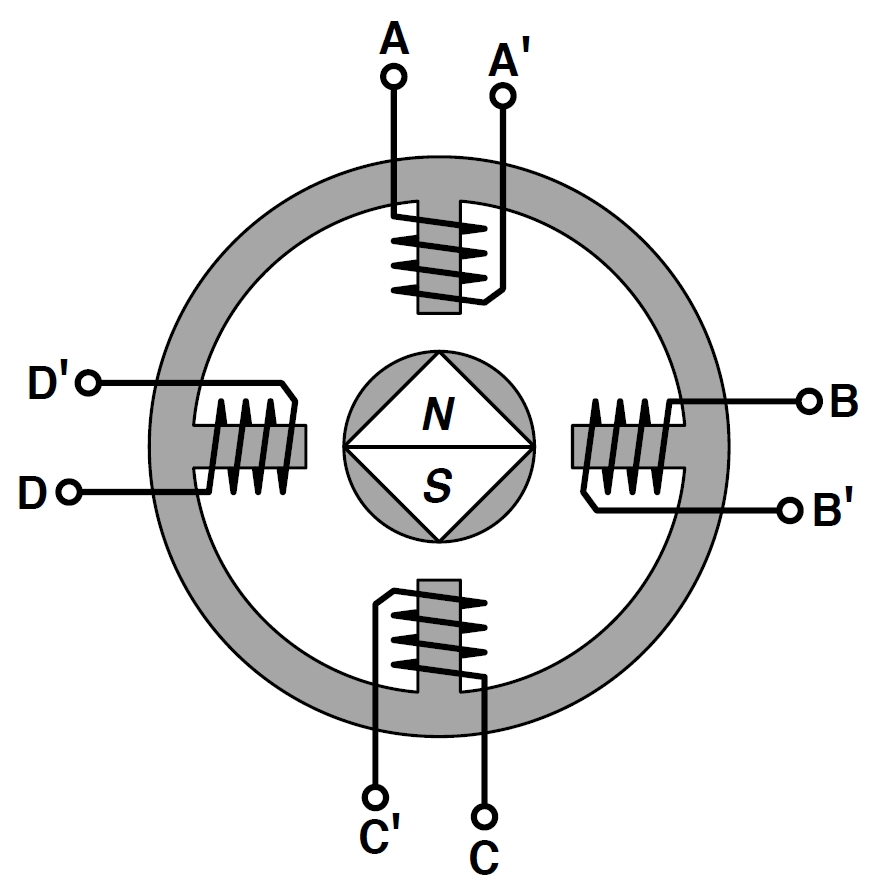
Na obvodu rotoru, vytvořeného z radiálně pólovaného permanentního magnetu, se u tohoto typu motoru střídají severní a jižní póly, jejichž počet je poloviční než počet pólů statoru.
Jednoduchá konstrukce těchto motorů a tím pádem nízké výrobní náklady je předurčují k použití ve spotřební a automobilové elektronice, kde není překážkou velikost jejich kroku (7,5 nebo 15°) a malý dosažitelný výkon.
Hybridní krokový motor

Motory této konstrukce vykazují nejlepší momentové i dynamické parametry a jsou dnes v průmyslových aplikacích používány téměř výhradně.
Rotor hybridního motoru má na hřídeli z nemagnetického materiálu nalisovány dva pólové nástavce. Mezi pólovými nástavci je uložen axiálně polarizovaný permanentní magnet, který zmagnetuje každý z pólových nástavců na opačnou polaritu. Rotorové pólové nástavce mají na svém obvodu drážky tvořící ozubení, jejichž počet určuje velikost kroku. Například pro počet rotorových zubů 50 vychází velikost kroku 1,8°. Rotorové pólové nástavce jsou proti sobě v osovém směru natočeny o polovinu rotorové zubové rozteče, proti zubům jednoho nástavce leží drážky druhého nástavce. Na statoru je osm vyniklých pólů, které jsou na čele též opatřeny drážkováním. Počty zubů statoru a rotoru nejsou shodné; obvykle se volí počet rotorových zubů větší.