

Podtitul této části článku o možnostech aplikací superkondenzátorů by mohl být „Stejný robot a mnoho variant napájení“. Kromě toho si ukážeme jeden dost netradiční, ale určitě zajímavý způsob využití superkondenzátorů v dílně.
Začneme s malým začátečnickým robotem, který může sloužit třeba jako sledovač čáry. Podvozek je z Robrouka, pohon zajišťují dva motory Pololu1124, místo ostruhy je jen ohnutý kus instalačního drátu. Řídící mikrokontrolér bude PICAXE 08M2 nebo při potřebě více signálů PICAXE 20M2. Pro náš účel je lepší uvažovat PICAXE, protože se s ním dá dosáhnout nižší spotřeby řídící jednotky, i když při pokusech je to víceméně jedno. Jediné napájecí napětí je společné pro řízení i pohon, může se pohybovat od 3,3 do 5,5 V.

Pokusný robot na podbozku Robrouka
Prostor pro zdroje je pod kontaktním polem mezi koly, maximální rozměry bloku mohou být 170x68x35 mm. Budeme sledovat možnosti a vlastnosti různých koncepcí zdroje jak s akumulátory tak kondenzátory. Optimální by bylo, kdyby rychlost pohybu byla stálá, ale to se v mnoha případech nepodaří. Při napájení 3,3 V je společný odběr pohonů v ustálené jízdě po rovině kolem 180 mA, při 5,0 V kolem 240 mA.
1x nebo 2x NiMH a měnič
Poněkud „šílená“ varianta s napájením jedním nebo dvěma články NiMH (případně primárními alkalickými bateriemi nebo NiCd) by mohla mít svůj smysl u menších robotů, šetřila by místo i hmotnost, tužkové články jsou asi nejrozšířenější. Samozřejmě, při malém počtu bude nutný (zvyšující) měnič napětí, ale to by neměl být problém, malé měniče s rozsahem 1 – 5 V / 5 V s udávaným proudem až 500 mA lze snadno koupit a jsou levné.
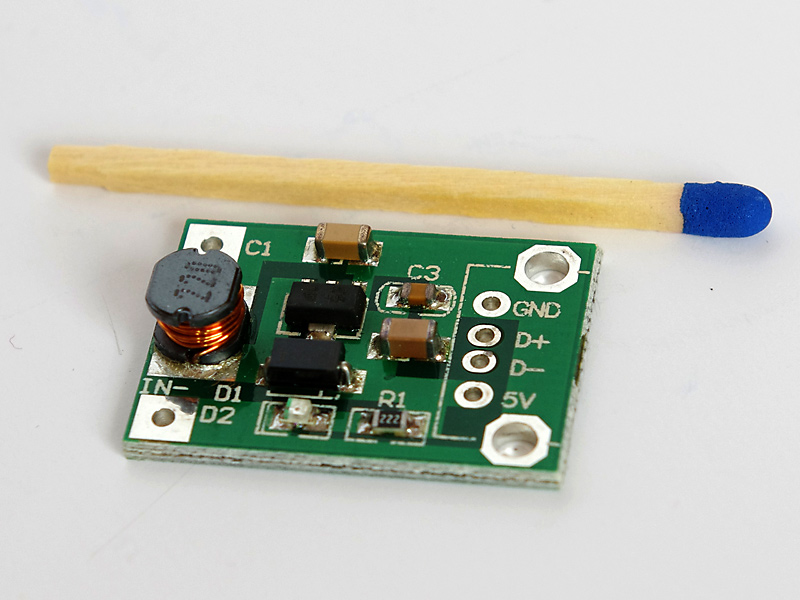
Levný měnič 1- 5 V / 5 V na proud až 0,5 A, hmotnost 2,2 g
Reálně narazíme na velký problém. Podobné měniče sice od 1 V opravdu fungují a přesně stabilizují 5,0 V, jenže rozhodně z nich nejde v tomto režimu odebírat potřebný proud kolem 200 mA. Ten na obrázku z jednoho článku NiMH zvládne kolem 50 – 60 mA (pokles napětí na 4,8 V), z dvou článků dokáže maximálně 180 mA. S třemi články by už použít šel, ale to jaksi ztrácí původní smysl.
Měnič by se dostal do přijatelnějšího režimu, kdyby měl na výstupu menší napětí 3,3 V a pracoval ze dvou článků. Zkusme dokonce ještě menší (plochou asi poloviční), ale trochu lepší měnič Pololu (č. 2563), ten může pracovat s napětím od 0,5 V a proud na vstupu může být až 1,2 A. Při napětí 2,4 V a odběru na výstupu 180 mA má proud na vstupu 330 mA a účinnost 75%, při vybitých článcích (1,6 V) se odběr zvedne na 600 mA (účinnost 61%). Výkon není velký, ale jde to. Vyšší proudový odběr z akumulátoru samozřejmě zkrátí jeho činnost. Měnič ale už nemá rezervu třeba pro zvýšený odběr při pohybu serv.
Tento způsob má svůj smysl, bude-li pohon robota napájen přímo z akumulátorů (ze dvou článků to už jde) a měnič bude použit jen k napájení řídící elektroniky s malou spotřebou třeba 10 mA. Pak měnič pracuje s lepší účinností až 80% a zhoršuje energetickou bilanci jen nepatrně. Není-li požadována dlouhá výdrž, stabilní napětí je velkou výhodou pro činnost mikrokontroléru i všech čidel.
4x NiMH přímo
Velmi oblíbená a jednoduchá varianta. Tužkové nebo mikrotužkové články jsou rozšířené a známé, poměrně snadno se nabíjejí a mají pro běžný provoz dostatečnou kapacitu až 2500 mAh. Při odběru kolem 200 mA vydrží zdroje v činnosti teoreticky až 12 hodin. Potíž je v tom, že nějakou dobu používaným článkům výrazně klesá kapacita a roste vnitřní odpor. Napětí hodně kolísá s odběrem, velký podíl na tom mívají i používaná pružinová pouzdra. I v ideálním případě se napětí v průběhu vybíjení mění z asi 5,4 V po 3,2 V. podobně bude kolísat i rychlost pohybu.
Hmotnost zdroje vychází přibližně 130 g. Není nutná žádná podpůrná elektronika. Z kvalitních akumulátorů (např. Sanyo Enoloop) by bylo možné v případě potřeby odebírat krátce proud až 3 A, ale bohužel to nedovolí pružinové pouzdro. Toto uspořádání je velmi náchylné na průnik rušení od pohonů do řídící elektroniky.

4 tužkové akumulátory přímo
1x Li-pol přímo
Jeden článek Li-pol 5 Ah má přibližně 100 g, je tedy lehčí a poskytuje 2x větší kapacitu a tedy i výdrž (cca 25 hodin). Ve skutečnosti je výdrž výrazně větší než 2x, protože NiMH svých teoretických parametrů nedosahují, Li-pol většinou ano. Akumulátor bez problémů dodá krátkodobě proud přes 100 A. Má menší napětí, takže rychlost je menší, ale je velmi stabilní, prakticky nezávislá na odběru dalších zařízení. Uspořádání je značně odolné vůči rušení od pohonu do řídící elektroniky. S vybíjením napětí klesá od 4,2 V do 3,3 V . 25 hodin chodu málokdo využije, obvykle se provozuje v menším rozmezí napětí 4,2 až 3,8 V. Snížené napětí elektroniky ubírá výkon a rychlost třeba i servům, za to tvrdé napájení nijak neomezuje jejich počet. Kvůli tomu, že akumulátor se přílišným vybitím (pod 3 V) zničí, je třeba hlídat a signalizovat mez vybití, nebo rovnou vypnout pohon.

Napájení jedním článkem Li-pol přímo
4x Li-pol paralelně přímo
Budeme-li se snažit o velkou výdrž, do vymezeného prostoru se vejdou 4 články Li-pol, každý 5 Ah. Paralelním spojením vzniká baterie o hmotnosti kolem 400 g s kapacitou 20 Ah, to odpovídá výdrži až 100 hodin. Jinak platí totéž, co v předchozím případě.
1x (4x paralelně) Li-pol a měnič
Napětí Li-pol dovoluje použit výše uvedený levný měnič i pro pohon nebo lépe jeden pro pohon, druhý pro elektroniku. Proti napájení přímo z akumulátoru získáme výhodu stabilního napětí 5 V, tedy vyšší a naprosto konstantní rychlost pohybu bez ohledu na míru vybití, zaplatíme za to přibližně poloviční výdrží. Asi 30% ztráty padne na vrub účinnosti měniče (pracuje v celkem příznivém režimu), asi 20% na vrub zvýšení výkonu při napětí 5 V. Musíme hlídat mez vybití 3 V. V případě potřeby je k dispozici zdroj schopný poskytnout krátkodobě velký proud (spojené Li-pol kolem 400 A) při typicky 3,5 V. Zvládne to, ale využijeme to jen těžko.
Lepší variantou je pohon napájet přímo z akumulátoru a přes měnič jen elektroniku, získáme stabilní napětí pro mikrokontrolér a čidla, menší výkon pohonu, ale také se zbavíme ztrát v měniči pro pohon. Vzhledem k tomu, že měnič nemá rezervu výkonu, nezvládne napájení například serv.
4x Li-pol sériově a měnič
Sériovým spojením 4 Li-pol dostaneme napětí 16,8 až 12 V, k napájení jak pohonu tak elektroniky budeme potřebovat měnič, ale tentokrát snižující napětí. Je jen na nás, zda nastavíme 3,3 V, 5 V, nebo něco jiného. I malý spínaný snižující měnič většinou zvládne pracovat s proudem do 2 A a s větší účinností, často 80 – 90%. Pohon bude mít stabilizované napětí, stále stejný výkon a rychlost, nebude mít problém při větší zátěži (odporu v pohybu, jízdě do kopce). Má-li elektronika společné napájení s motory, může být problém s rušením od pohonu, ale nepatrný odběr elektroniky se dá snadno zajistit samostatným malým lineárním stabilizátorem napájeným odděleně z akumulátoru, pak je naopak odolnost proti rušení vynikající. Výdrž proti přímému napájení ze 4 Li-pol sériově při nastaveném napětí 4 V klesne asi o 20%, nicméně výkon je stabilní a měnič má dobrou rezervu třeba i pro vyšší odběr serv během pohybu. Současně je ale počet (současně běžících) serv omezen maximálním proudem měniče.

Měnič 3 – 35 V / 1- 35 V, max. 2A (tento dokonce umí zvyšovat i snižovat napětí)
Zásadní výhodou tohoto způsobu je přítomnost zdroje, který může napětím kolem 14 V napájet krátkodobě zařízení s odběrem 50 – 100 A, takže s rezervou třeba i čtyři nebo šest žárovek světlometů z auta současně. Je mnoho různých přídavných zařízení, které mají napájecí napětí autoakumulátoru. Když má zařízení nesené robotem krátkodobě velký odběr, je toto rozumná cesta.
4x superkondenzátor paralelně
Dostáváme se k jádru věci. Osadíme 4 ks superkondenzátorů spojených paralelně, dostaneme kapacitu 1400 F na napětí 2,7 V, vybíjením napětí klesá až k nule. Máme malé napětí, ale zdroj lze pulzně zatížit proudem teoreticky až 900 A, v praxi budeme pochopitelně omezeni tím, co vydrží spoje mezi akumulátory. Tuto vlastnost jen velmi těžko jakkoli využijeme, nicméně kdyby byla potřeba, lze to.
Jsme ve velmi podobně nepříznivé situaci jako při pokusu o napájení jedním nebo dvěma články NiMH (proto také byla tato možnost uvedena jako první), jen je vše horší, napětí klesá víc. Bude nutný zvyšující měnič, ale ani ten nebude schopen vyčerpat všechnu energii z kondenzátoru, část jí zůstane nevyužita. Rozhodně bude nutné použít měnič alespoň pro napájení elektroniky, pohony můžeme buď napájet přes druhý měnič nebo přímo, pak ale rychlost bude od počátku malá a s vybíjením bude neustále plynule klesat až do zastavení při napětí kolem 1 V. Měnič nemá velkou rezervu výkonu, takže krátkodobý odběr například při pohybu serv už nezvládne.

Napájení čtyřmi superkondenzátory (zde v sériovém zapojení)
Blok kondenzátorů Maxwell 350 F D-Cell měl hmotnost 254 g, vyplnil téměř celý vymezený prostor. Zkoušet první (levnou) verzi měniče na 5 V ani nemělo smysl, nasazen byl rovnou zvyšující měnič Pololu (č. 2563) schopný pracovat s menším napětím na vstupu i větším proudem. Na výstupu měniče bylo stabilně 3,25 – 3,30 V a při odběru 180 mA se podařilo z počátečního napětí kondenzátorů 2,7 V napájet pohon po dobu 85 minut. Z kondenzátorů bylo odčerpáno téměř přesně 80% uložené energie. Zbylých 20% energie se buď pomalu vybije jako ztráty, nebo zůstává do dalšího nabíjecího cyklu.
Je téměř hodina a půl nepřetržitého pohybu málo nebo dost? Proti možnostem Li-pol je to velmi málo, ale současně je to doba provozu už dobře použitelná, zejména když výkonným síťovým nabíječem je možné energii plně dobít nejvýš za půl minuty. Není nutné balancování, to zjednodušuje elektroniku.
Napájení 4x superkondenzátor sériově
Stejný robot, stejné kondenzátory, jen jinak pospojované, a pochopitelně jiný měnič. Opět nastoupil kombinovaný snižující/zvyšující měnič nastavený na výstupní napětí 3,3 V. V tomto uspořádání byl pohon schopen běžet 89 minut, doba chodu byla téměř stejná. Z kondenzátorů se vyčerpalo přes 90% energie.
Výhodou sériového spojení je jednak to, že snižující měniče mají většinou lepší učinnost (v tomto případě to neplatilo), jednak to, že poměrně snadno dovolí vyšší odběr, takže zůstává rezerva výkonu přeba pro krátkodobý odběr serv. Obvykle se také sériová kombinace snadněji nabíjí, při rychlém nabíjení nemusíme pracovat s tak velkým proudem. Nevýhodou je, že s výjimkou pokusů, kdy napětí na jednotlivých kondenzátorech ohlídáme „ručně“, je třeba instalovat balancer buď přímo do robota, nebo mít výkonný balancující nabíječ a při uložení robota nechat všechny kondenzátory vybít na nulu sadou rezistorů připojenou na servisní konektor.
Napájení aku + skuperkondenzátor
Poslední verze napájení bude kombinovat akumulátory a superkondenzátory. Nepotřebujeme tentokrát velkou výdrž, klidně by stačila čtveřice tužkových nebo dokonce mikrotužkových NiMH akumulátorů. Pohon má stále stejné velmi umírněné nároky. Potřebujeme ale, aby robot nesl silný světelný LED zdroj a mohl krátce (jednotky sekund) osvítit okolí. LED reflektor odebírá kolem 10 A.

4x NiMH + 2x superkondenzátor 350 F / 2,7 V
Osadíme dva kondenzátory 350 F spojené sériově a použijeme nejjednodušší možné zapojení, kdy je sada kondenzátorů přímo paralelně připojena k akumulátoru. K balancování stačí zapojení s jedním operačním zesilovačem uvedené v předchozím dílu. Protože při velkém odběru se o proud podělí jak superkondenzátory tak akumulátory podle svých možností, bylo by velmi nerozumné mít NiMH akumulátory v pružinovém pouzdru, sada by měla být spájená.
Není možné připojit vybité kondenzátory přímo k akumulátoru, v podstatě by došlo ke zkratu akumulátoru a jeho vývody by přehořely. Před spojením je nutné nabít kondenzátory na přibližně stejné napětí jako má akumulátor, následné společné vybíjení a nabíjení už nedělá větší problémy. Při uložení na delší dobu do klidu se musí brát v úvahu, že kondezátory svým samovybíjením urychlují vybíjení akumulátoru a ten vyžaduje častější údržbu.

Napětí na kombinaci NiMH + superkondenzátor
Na záznamu z osciloskopu je zachyceno, jak to celé funguje. Jeden dílek představuje čas 20 s! Odběr reflektoru kolem 10 A by samotný NiMH akumulátor této velikosti rozhodně nezvládl. Jakmile se reflektor rozsvítí, napětí plynule klesá a energie je brána především z kondenzátoru. Odběr trvá 10 sekund a za tu dobu napětí klesne o necelých 0,6 V. Jakmile odběr skončí, akumulátor dodává „co mu síly stačí“ energii zpět do kondenzátoru, obnovení (téměř) původního napětí se podaří přibližně za 300 s = 5 minut. Znovu rozsvítit se dá samozřejmě i před uplynutém této doby na zotavení, ale nesmí se to přehnat, protože pokud by napětí kleslo příliš, nabíjení kondenzátoru by už akumulátor zatížilo nepřiměřeně.
Podobné případy nejsou nijak vzácné, může jít asi nejčastěji o jedno nebo víc silných serv, která se sice hýbou jen občas, ale k přesunu potřebují 4 – 6 A, k rozběhu dokonce víc, zhruba dvojnásobek. Silná serva si buď vynutí mnohem silnější zdroje trvale dimenzované na svůj proud, nebo při jejich použití „padá“ napětí palubní sítě a vzápětí i řídící mikrokontrolér. Doba chodu serv bývá podstatně kratší než 10 s, k vykrytí odběrových nárazů proudu stačí kondenzátory s kapacitou 20 – 100 F / 2,7 V, které jsou podstatně menší a lehčí.
Může jít ale třeba i o hydraulický systém, který jen občas potřebuje zabrat, a tlaková olejová pumpa rozhodně nepatří mezi zařízení s malým odběrem, 10 – 20 A je celkem normální. Je-li pumpa spínána jen na nezbytnou dobu, bez problémů její napájení „podrží“ superkondenzátory. Nemusí se osazovat samostatný zdroj a použití nemá větší vliv na palubní napětí.
Bodová svářečka se superkondenzátorem
Možnost odebírat ze superkondenzátoru proud stovek ampérů při napětí jednotek voltů silně připomíná parametry bodových svářeček. Při jejich amatérské konstrukci se typicky vychází z převinutého transformátoru z mikrovlnky (MOT) a výsledek je výkonný, výborně použitelný, ale pro měřítka amatérské dílny dost velký a těžký. Rozměry a hmotnost svářečky můžeme dramaticky zmenšit, když použijeme nějaký existující nabíjecí zdroj a superkondenzátor. Dokonce potom nemusí být svářečka v době práce ani připojená na síťové napájení, ale může mít podobu ručního nářadí a být nabíjená v doku podobně jako nářadí akumulátorové.
Jediný kondenzátor Maxwell D-Cell 350 F zvládne dodat energii pro jeden svar tenkých konzervových plechů nebo vzájemné svaření dvou železných drátů o průměru do 1 mm, proud jde přímo z kondenzátoru do elektrod. Na obrázku jsou vlivem nevhodného tvaru elektrod tyto svary ne zrovna úhledné, nicméně dostatečně pevné. Při kapacitě vyšší než 1 kF (3x 350 F) a plném napětí (2,7 V) už se plechy někdy i roztečou a proděraví. Musíme se ovšem smířit s prodlevami na nabíjení mezi jednotlivými bodovými svary a regulací energie svařování hrubě sestavením vhodné kapacity z více kondenzátorů a jemně napětím na kondenzátoru.
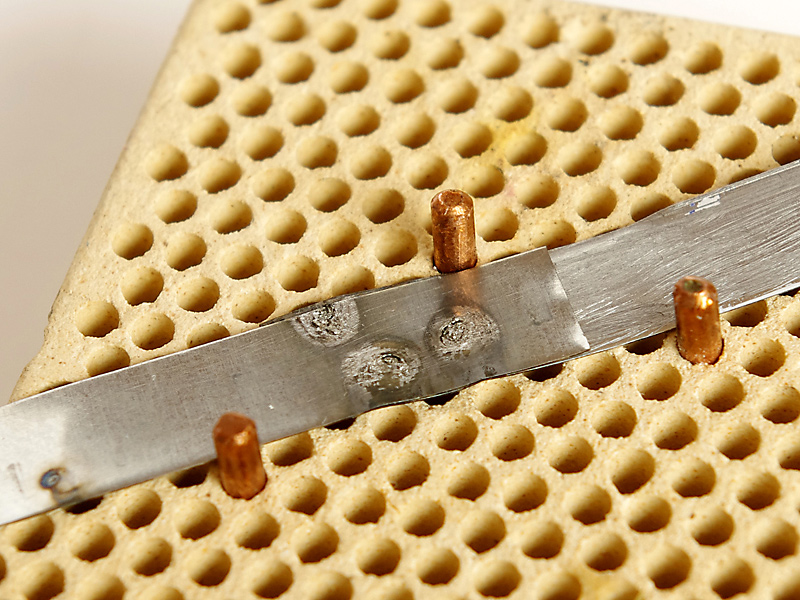
Bodové svary tenkého plechu dělané pomocí superkondenzátoru
„Kapacitní“ bodová svářečka není lepší než klasická transformátorová, je jiná. Pracuje se s ní pomaleji, ale je konstrukčně extrémně jednoduchá a při občasném použití stačí. Pohodlně se uloží do zásuvky stolu. Tím, že se kov taví při menším napětí a větším proudu, nejde vytáhnout oblouk, dokonce při špatném kontaktu ani moc nejiskří. Když spojovaný materiál drží mechanicky u sebe i jinak než pouze stlačením mezi elektrody, jde bez nepříznivých jevů přerušit svařování oddálením elektrod. V tom případě se může použít podstatně vyšší kapacita a dělat i několik spojů v rychlém sledu. Kolem spojů se tvoří méně oxidačních zbytků, bodové svary jsou čistší. Pro průmyslové využití a výkonné bodové svářečky není tento způsob vhodný, tam jde o výkon a rychlost práce, ale v amatérské dílně může být podobná pomůcka velmi zajímavá.
Kat. 2