

Tentokrát se blíže podíváme na využití modulu driveru pro řízení dvou stejnosměrných motorů nebo jednoho krokového motoru s obvodem A4990 od firmy Allegro MicroSystems.
Modul na DPS o rozměrech 20×15 mm obsahuje obvod A4990 v SMD provedení, výkonový FET tranzistor ve funkci ochrany proti přepólování napájení a několik kondenzátorů. 16 vývodů modulu je soustředěno do dvou řad podél delších okrajů. Výrobek je dostupný v internetovém obchodě SnailShop.cz . Spolu s modulem se dodávají kontaktní „hřebínky“, které si uživatel zapájí do prokovených otvorů sám, nebo může do otvorů zapájet vodiče. Rozteče kontaktů dovolují modul zasunout do kontaktního pole. Popis ze spodní strany desky usnadňuje orientaci při zapojování.
Modul s obvodem A4990 (ze stránek www.pololu.com)
Provozní napětí je 6 až 32 V, výstupní proud může být 0,7 A trvale pro každý můstek s možností krátkého přetížení do 0,9 A. Pokud je modul využíván při horním okraji povoleného proudu (zejména v součinnosti s krokovým motorem), je vhodné jej chladit přinejmenším volným prouděním vzduchu kolem, lépe aktivním ofukováním a nalepením hliníkového žebrovaného chladiče na obvod.
Modul je vybaven ochranou proti přepólování napájení, ochranou proti přepětí do 40 V (samotný obvod snese až 50 V, ale ochranný FET jen 40 V), proti podpětí, přehřátí, proti zkratu výstupu se zemí nebo napájecím napětím a proti zkratu výstupů mezi sebou.
Rozmístění vývodů modulu ukazuje následující obrázek. Všechny tři vývody označené jako zem (GND) je vhodné propojit, ale není to nezbytné, jsou spojené na desce. Vstupy IN1 až IN4 jsou kompatibilní s logickými obvody s napájením 3 až 5 V. Vstup INH při stavu L uvede obvod do stavu spánku (úsporný režim) s odpojenými výstupy pro motory, ve stavu H je obvod funkční.
Vývody EF1 a EF2 jsou výstupy s otevřeným kolektorem, kterými může modul signalizovat výskyt a druh chyby nadřízenému mikrokontroléru. Aktivní úroveň je L, na vstupech mikrokontroléru se nastaví pullup rezistory. Při podpětí se odpojí výstupy, ale není hlášena chyba, při aktivním výstupu EF1 došlo k odpojení zátěže (přerušení přívodu k motoru), při aktivním výstupu EF2 k překročení výstupního proudu, aktivní EF1 i EF2 současně znamená přehřátí obvodu nebo přepětí.
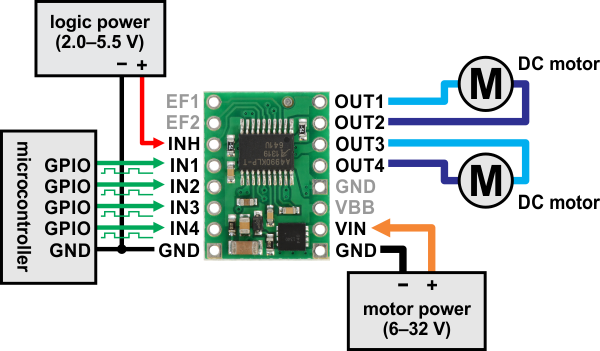
Zapojení modulu do sestavy (ze stránek www.pololu.com)
Standardní vstup napájecího napětí pro obvod i motory je na vývodu V(IN). Použijeme-li tento vstup, je modul chráněn proti přepólování a dokonce z výstupu V(BB) můžeme napájet další zařízení, která jsou stejným způsobem chráněna také. Je tu ale ještě druhá možnost, nepoužijeme V(IN), ale napájení zavedeme do V(BB). Tím se obejde ochrana proti přepólování, ale na druhou stranu můžeme využít nižší napájecí napětí typicky až 5,5 V. Tento trik má význam a smysl v situaci, kdy napájecí napětí je velmi blízké spodní mezi (6 V) a současně využíváme téměř celý rozsah povoleného proudu (2x 0,7 A).
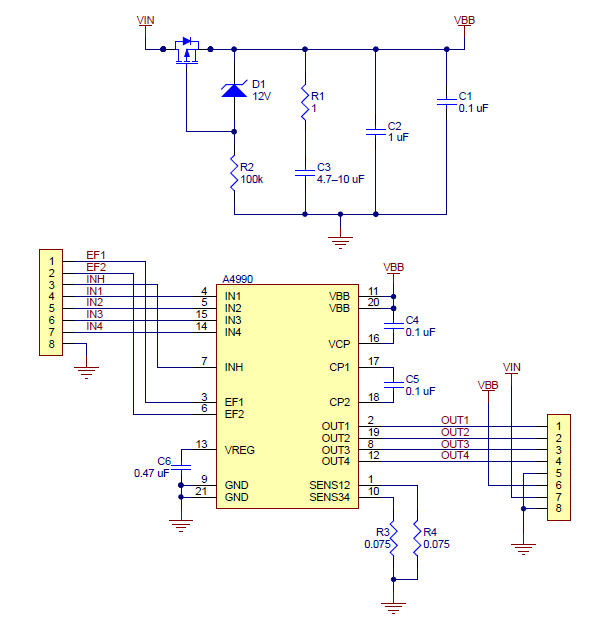
Schéma zapojení modulu (ze stránek www.pololu.com)
Jsou-li oba vstupy pro jeden můstek na stejné úrovni H nebo L, motor se otáčí jedním nebo druhým směrem, jsou-li na nich různé logické úrovně, motor je brzděn podobně jako v případě, že jsou vstupy nezapojené. Pro řízení výkonu motorů lze použít PWM modulaci.
Poslední obrázek ukazuje druhé možné využití modulu s A4990, a to k řízení jednoho krokového motoru. V tomto případě se ale motor nebude jako s „inteligentními“ řadiči vyvinutými speciálně pro daný účel řídit dvěma signály (směr pohybu a provedení kroku, případně i s možností nastavení mikrokroků), ale nadřízený mikrokontrolér musí kompletně ovládat fáze obou vinutí motoru. Další rozdíl je v tom, že vinutí není napájeno stabilním proudem, ale jen připojeno k napájecímu napětí, jeho odběr musí být definován odporem vinutí nebo jinak. Stále ale jsou v činnosti všechny ochrany.
Využití A4990 k ovládání krokového motoru
Kat. 1