

Ve dnech 11. a 12. dubna se ve Vídni konal již 12. ročník robotické soutěže RobotChallenge. Zúčastnili jsme se tento rok pouze jako pozorovatelé. Chystáme robota na příští ročník a proto bylo vhodné seznámit se s reálným průběhem zápasů a možnými problémy a nedostatky. V tomto články bychom rádi shrnuli průběh celé soutěže, poznatky o disciplíně PuckCollect (které se hodláme zúčastnit), ale okrajově také informace o cestě, ubytování a podobných věcech pro ty, kteří by se rádi zúčastnili, ale z nedostatku zkušeností se bojí vyrazit.
Průběh soutěže
Soutěž se odehrává v kongresové budově přímo v historickém centru Vídně. V přízemí se nacházel bufet pro soutěžící a první expozice robotů v kategorii Freestyle. V této kategorii nebyli pouze roboti, ale také různé elektronické vynálezy. Jedním z nich byla pomůcka pro slepé – brýle s infračervenými senzory, které při detekci překážky ve vzdálenosti cca 40 cm silně vibrovaly. Na dvě tužkové baterie vydrží asi půl hodiny a podle tvůrců jsou výrobní náklady 2$.

Brýle pro osoby se zhoršeným zrakem.
Dalším byla robotická ruka, použitelná protetická pomůcka. Uměla pouze otevírat a zavírat pěst, ale při manipulaci s předměty byla obstojná. Otevírání a zavírání se spouštělo pomocí tlačítek umístěných pod palcem v botách.
V soutěži dále byli různí roboti připravení jako robotické sondy pro výzkum cizích planet, dálkově ovládaný dron se spoustou senzorů nebo například robot orientující se v prostoru pro přepravu a manipulaci s předměty ve skladištích. V prvním patře budovy je zázemí pro soutěžící. Vstup je kontrolovaný a nikdo jiný než účastníci se sem nedostane, proto se nemusíte bát nechávat zde své věci. V celé budově je sice Wifi připojení, ale při zaplnění místnosti je celkem nepoužitelné, proto na jeho dostupnost rozhodně nelze spoléhat. Uvidíte zde také soutěžící na poslední chvíli dodělávat úpravy robotů, tak není neobvyklé setkat se s pájením čí řezáním plechu brusným kotoučem. Také zde soutěžící testují své roboty, což je v případě robotů pro mega sumo dost nebezpečné.
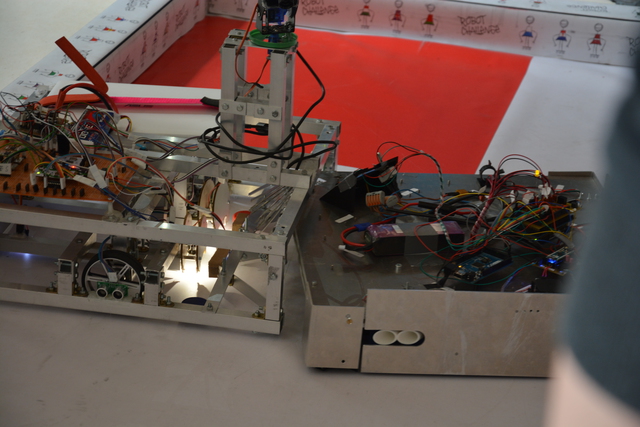
V prvním patře budovy je zázemí pro soutěžící. Vstup je kontrolovaný a nikdo jiný než účastníci se sem nedostane, proto se nemusíte bát nechávat zde své věci. V celé budově je sice Wifi připojení, ale při zaplnění místnosti je celkem nepoužitelné, proto na jeho dostupnost rozhodně nelze spoléhat. Uvidíte zde také soutěžící na poslední chvíli dodělávat úpravy robotů, tak není neobvyklé setkat se s pájením čí řezáním plechu brusným kotoučem. Také zde soutěžící testují své roboty, což je v případě robotů pro mega sumo dost nebezpečné.

Test robota určeného na Megasumo v zázemí pro účastníky

Úpravy plechů
Ve druhém (a pro soutěž posledním) patře budovy se odehrávají samotné zápasy. V místnosti se nacházelo jedno hřiště pro soutěž sledování čáry, jedno hřiště kryté sítí pro létající drony a několik stolů pro různé kategorie suma. První den se odehrávaly kvalifikace pouze v těchto soutěžích. Druhý den přibylo hřiště pro kategorii PuckCollect a pro Sprint. Přibyla také kategorie suma pro humanoidní roboty. Byly zde také speciální samostatné kategorie pro roboty využívající lego mindstorms (jen sledování čáry a sumo). Robotů z lega bylo velké množství, podle pozorování možná celá polovina.
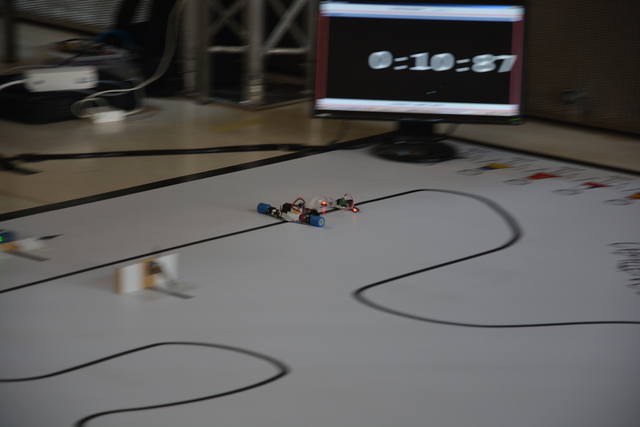
Při kvalifikaci pro sledování čáry se spoustě robotů stalo, že nedokázali soutěžní dráhu vůbec projet. Nachází se na ní několik ostrých zatáček, na což je při trénování nutné myslet, a nejezdit pouze po jednoduchých okruzích. Bylo možné zúčastnit se také překážkové verze této disciplíny. Na hřišti se nacházela cihla, kterou bylo nutné objet, čára byla v jednom místě přerušena a robot také musel přejet „houpačku“.
Zápasy v robo sumu jsou většinou velice rychlé, po několika sekundách je po všem. Soutěžilo se ve čtyřech kategoriích podle váhy, kdy nejmenší kategorie má váhový limit 25g a největší 3 kg. Zápasy v nejtěžší kategorii už občas připomínají destrukční zápasy robotů oblíbené v USA.
Puck collect
Nejvíce jsme sledovali disciplínu s názvem Puck Collect (sbírání puků), protože připravujeme vlastního robota se kterým se chceme této disciplíny účastnit.
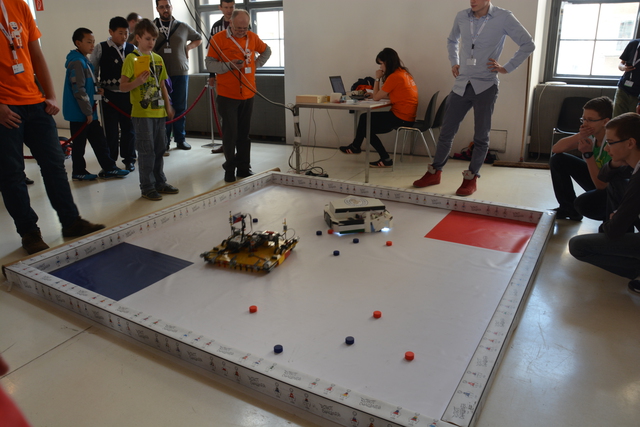
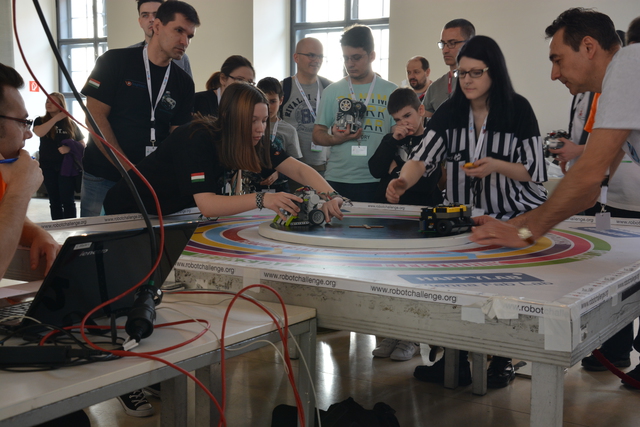
Soupeří proti sobě dva roboti na hřišti čtvercového tvaru o hraně 2,5 metru. Robot se svými rozměry musí vejít do čtverce o hraně 50 cm a tyto rozměry jsou přísně hlídány. Na hřišti se nachází 10 červených a 10 modrých puků. V protilehlých rozích se nachází červený a modrý čtverec se stranou 70 cm dlouhou. V každém z nich se na začátku nachází jeden robot, podle toho jakou barvu má přiřazenu. Dále tento čtverec budeme nazývat „domeček“. Cílem robotů je sesbírat puky své barvy a odvézt je do svého domečku. Za každý dovezený puk své barvy dostane jeden bod, za každý dovezený puk soupeřovy barvy jeden bod ztrácí. Pokud robot do domečku odveze puk a zanechá ho zde, je puk ihned odstraněn z hřiště a body jsou započítány. Hra končí v okamžiku kdy jsou všechny puky jedné barvy sesbírány a odvezeny nebo po uplynutí časového limitu tří minut. Hru také může předčasně ukončit rozhodčí v případě poruchy obou robotů.
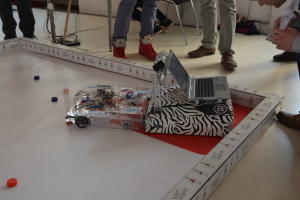
Naprostá většina robotů byla čtvercového tvaru. Jeden tým však přijel s robotem kulatým a dva s roboty postavenými z lega mindstorms ,s poněkud netradičním tvarem. Mezi týmy byl velký rozdíl v použitých technologiích, materiálech a řídících strategiích. Například jeden robot používal místo baterie externí zdroj pro nabíjení mobilních telefonů a na tělo materiál podobný kartonu, další robot měl dokonale vyvedené tělo z laserem řezané překližky, jiný z na míru řezaného plexiskla.

Robot určený pro PuckCollect s tělem a mechanikou z překližky
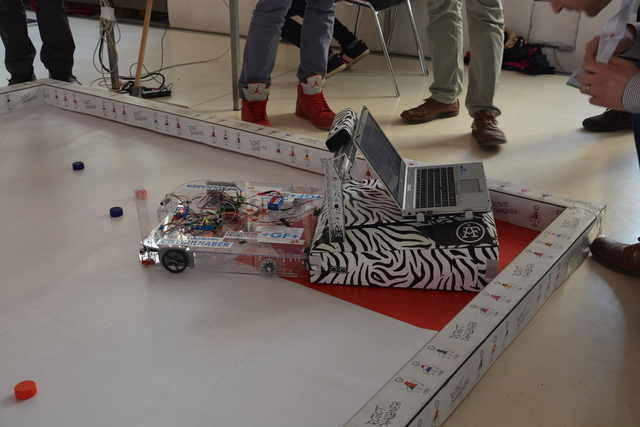
Několik robotů používalo pro navigaci v prostoru Kinect, tito roboti však museli pro řízení použít mininotebook. U některých z nich bylo vidět, že robot po oskenování prostoru dokáže rozpoznat umístění puku a jet ho sebrat. Tato úloha je však výpočetně náročná a proto se projevila na celkové rychlosti robota (robot trávil značnou část času pouze na jednom místě, když „přemýšlel“). Roboti postavení z lega se ukázali jako poměrně nevhodní, zejména ti s nestandardními tvary. Jejich křehká konstrukce často nevydržela kontakt s robustnějšími plechovými roboty, a tak při každém setkání z legobota doslova létaly součástky. Mnohokrát se stalo, že kovový robot při nárazu odtrhl část legobota, někdy se o utržené části i zasekl.
Robot z lega Mindstorms určený pro PuckCollect
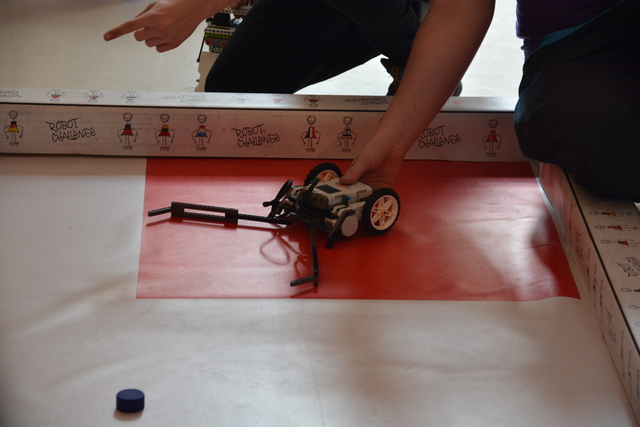
Pro sbírání robotů všichni, až na jednoho, používali techniku shromažďování puků pod tělem robota (puky se neustále dotýkaly země), a jejich následné vypuštění na požadovaném místě, například pomocí záklopky ovládané servomotorkem. Kulatý robot používal mechanické rameno, které puk uchopilo do kleští a následně ho podle barvy přeneslo do zásobníku.
Roboti používající pokročilé technologie rozpoznávání obrazu a orientace v prostoru se v praxi příliš neosvědčili. Výpočty trvaly příliš dlouho a tak než se tito roboti rozkoukali, jednodušší modely jim mezitím vybraly téměř všechny puky. První a třetí místo obsadili roboti, jejichž chování vypadalo jako náhodné projíždění prostorem, pouze se senzory na stranách detekující stěnu či soupeře.
Protože možnost podívat se na skutečné zápasy nám ukázala nedostatky, na které bez předchozích zkušeností při stavbě většinou nelze myslet, v dalším textu je seznam nejvážnějších z nich. Každý z nich zapříčinil ve skutečném zápase prohru či poškození robota.
Zde je seznam jednotlivých bodů:
- Většina účastníků vypadala, že podcenila přípravu robota na kontakt se soupeřem. Někteří roboti jezdili rychle a poměrně agresivně. Soupeřící robot slabší konstituce, či příliš lehký, byl při nárazu odstrčen, u legobotů se stalo, jak bylo dříve zmíněno, že byl při každém nárazu poškozen.
- Na robotovi by neměly být žádné výstupky ani plochy, kde by se mohl soupeřící robot nějak zaháknout. Při zápase se stalo, že se dva roboti takto o sebe zahákli, a do konce zápasu se z toho nedostali.
- Jeden robot měl velkou díru pro sběr puků (cca 20 cm vysokou prohlubeň). To je také nebezpečné, soupeř v jednu chvíli zápasu najel do prohlubně rohem a už se od tamtud nedostal.

Kolize robotů – jeden zajel rohem do těla soupeře
- Někteří roboti nevypouští sebrané soupeřovy puky (pravidla toto nijak nezakazují), a proto pokud robot na začátku zaváhá, může se stát, že pro něho nezbudou žádné puky. Toto se při zápasech stávalo běžně. Než se robot rozkoukal, soupeř „vysál“ téměř veškeré puky.
- Je nutné, aby se robot byl schopný vrátit do svého domečku a odložit sebrané puky. Jeden z robotů, který jinak jezdil a sbíral velice dobře, toto neměl příliš propracované. Často se stávalo, že sice sebral veškeré své puky, ale protože jezdil pouze náhodně po hřišti, již se s nimi nedokázal vrátit.
- Spusta robotů neměla moc dobře vyřešené nárazníky pro detekci pohybu. Nejčastěji se používaly ultrazvukové senzory a Kinect. Někteří roboti se nedokázali vyrovnat s čelní srážkou se soupeřem, další se při nárazu rohem do stěny přestali hýbat.
- Jak již bylo řečeno, nemá asi smysl pouštět se do pokročilých věcí typu rozpoznání obrazu a orientace v prostoru, pokud není robot schopen hned na začátku vyrazit a sesbírat alespoň nějaké puky bez zdržování (například nějakým náhodným algoritmem)
- Je také nutné myslet na to, že soupeř se může zaseknout v našem domečku (ať už náhodou nebo schválně).
Cestovní informace
Cesta z Prahy do Vídně autem trvá asi 4 hodiny. V případě, že se rozhodnete jet autobusem, například se Student Agency, cesta potrvá podobně dlouho s cenou 480 kč. Autobus jezdí několikrát denně. Soutěžící jsou ubytováni v hostelu kousek od centra Vídně, v blízkosti stanice metra. Stanice metra je taktéž přímo u budovy kongresového centra. Cena za ubytování je 20€/noc. Pokoje jsou pro sedm lidí, my například bydleli s týmem z Polska. V ceně ubytování je snídaně. Samozřejmostí je Wi-fi připojení na pokojích. Ceny za potraviny jsou mnohem vyšší než u nás, nejlevnější večeře v blízké restauraci vyjde na 8€, jedno pivo na 3,5€, 1,5 litrová lahev vody na 70 centů. Vzhledem k tomu, že se soutěž odehrává přímo v historickém centru, lze asi za 2 hodiny obejít hlavní Vídeňské památky.