

Pojem relé zná asi každý, kdy se jen minimálně zabývá elektronikou, a představu o tom, jak vypadá a funguje, mívá také. Ale znáte polarizovaná relé? Přitom jde o poměrně běžné součástky, které nesmíme s těmi „obyčejnými“ relé zaměnit. A co je to rezonanční relé, to dnes už ví téměř jen nejstarší generace.
Klasické relé funguje velmi jednoduše. Elektromagnet při průchodu proudu přitáhne kotvu, ta mechanicky pohne s kontakty a sepne je nebo rozpojí. Je jedno, jaká je polarita proudu cívkou elektromagnetu, kotva přitáhne v obou případech. Střední (pohyblivý) kontakt může být trvale jen ve dvou polohách a pro trvalé sepnutí je nutný trvalý průchod proudu.
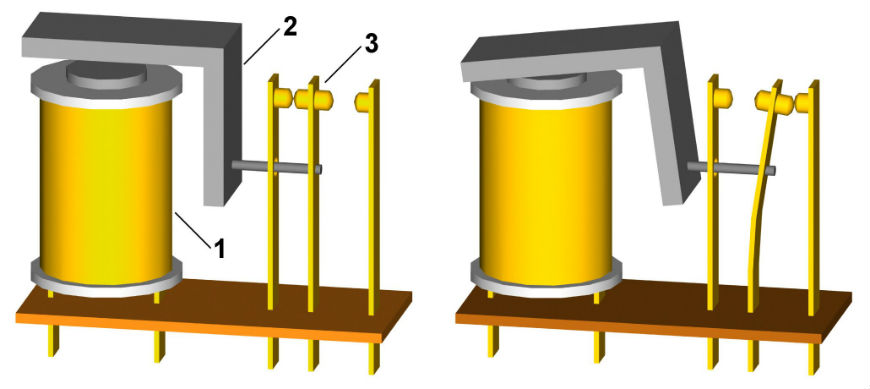
1 – elektromagnet, 2 – kotva, 3 – kontakty (obrázek z www.educachip.com/arduino-rele-5v/)
Polarizované relé má také cívku elektromagnetu (někdy rovnou dvě), kotvu a kontakty, pracuje ale jinak. Jsou dvě základní možnosti:
1/ Relé je bistabilní, takže je stejně jako v předchozím případě buď v jedné nebo druhé poloze, ale rozdíl je v tom, že bez průchodu proudu zůstane relé samo v té poloze, v které bylo, nevrací se do klidového stavu. Po přivedení napětí jedné polarity se kotva překlopí do polohy sepnuto, do druhé polohy se kotva překlopí po přivedení napětí opačné polarity. V této poloze opět setrvá.
2/ Relé je v podstatě třístavové. Po přivedení napětí jedné polarity se kotva překlopí do jedné krajní polohy, při opačné polaritě do druhé, ale ve stavu bez napětí je kotva v neutrální poloze (mezi oběma krajními kontakty) nebo případně může spínat třetí kontakt odpovídající neutrální poloze.
Protože bývá jednodušší spínat proud do cívky jen v jedné polaritě (postačí tranzistorový spínač) než polaritu přepínat (to vyžaduje polomůstek nebo H můstek), dělají se polarizovaná relé někdy se dvěma vinutími na jednom jádru elektromagnetu. Průchodem proudu jedním vinutím relé přejde do jedné polohy, průchodem proudu druhým vinutím do druhé.
Polarizované relé
Polarizovaná relé se většinou nedělají s kontakty pro velké spínané proudy, i když s trochou fantazie je možné považovat i nejvýkonnější stykače s přestavováním polohy pomocí elektromotorů nebo hydrauliky za jistý druh jejich „příbuzných“.
Základní výhodou polarizovaných relé je to, že jimi proud protéká jen velmi krátce při přestavení polohy, ne trvale po dobu sepnutí kotvy. Jsou tedy nesrovnatelně úspornější z hlediska spotřeby energie a z tohoto pohledu výhodnější zejména ve spojení s mikrokontroléry a bateriovým napájením. Stejně jako obyčejná relé mají sepnuté kontakty malý přechodový odpor (a minimální úbytek napětí), v rozpojeném stavu mají velký odpor (minimální svod) a dobře snášejí velká napětí, galvanicky oddělují řídící a řízený obvod. Na rozdíl od polovodičových spínačů jsou velmi dobře použitelná i pro spínání vysokých frekvencí (až řádu GHz). Stejně jako obyčejná relé jsou to elektromechnické součástky, takže jsou poruchovější než čistě elektronické spínače a jsou méně odolné třeba vůči vibracím. Naopak jsou odolnější vůči elektromagnetickým pulzům nebo radiaci. Není nutné myslet hned na jaderné výbuchy, tohle má velký význam třeba v kosmickém výzkumu, takže když podobnou součástku uvidíte v moderní družici, není to důsledek mnoho desetiletí zastaralého konzervativního přístupu konstruktérů, ale spíše naopak.
Příklad v současné době dodávaných polarizovaných relé najdete třeba v sortimentu firmy Conrad (v daném případě bistabilní relé s jednou cívkou) nebo SOS (bistabilní relé se dvěma cívkami).
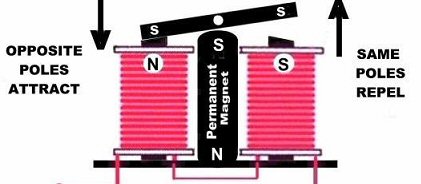
Některá polarizovaná relé, zejména ta třístavová, nemají klasický elektromagnet a kotvu, ale podobají se spíše (deprézským) měřicím přístrojům s otočnou cívkou a „nulou“ uprostřed rozsahu. Místo ručky a stupnice mají jen krátké rameno se středním kontaktem. Výhodou takového řešení je velmi malý proud nutný k sepnutí, třeba staršímu relé RD 10 (z výroby Metra Blansko) stačí k sepnutí na jedné nebo druhé straně proud jen 100 μA. Ostatně i to, že tato relé vyráběl podnik zaměřený na ručkové měřicí přístroje a ne klasická relé ukazuje na silnou příbuznost obou výrobků.

Starší třístavové polarizované relé RD10
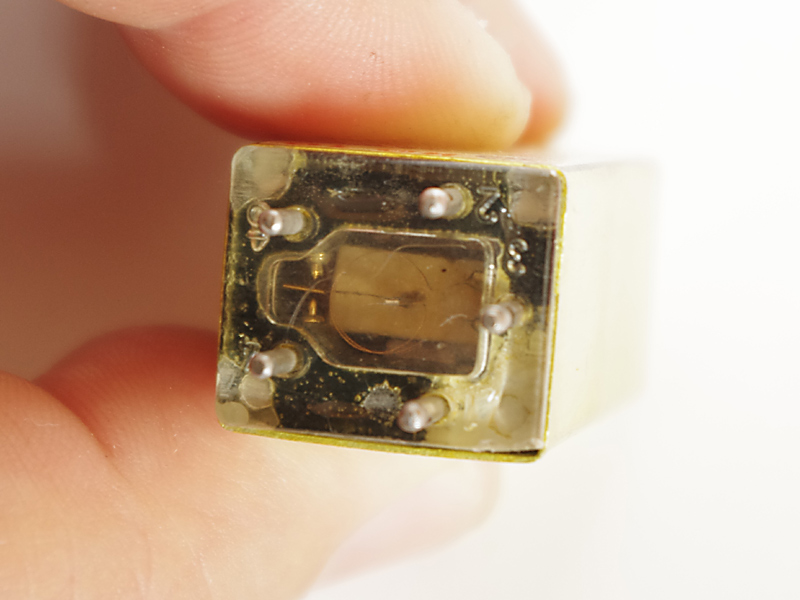
Pohled dovnitř relé přes průhledný plast patice – je vidět osa samonosné cívky, napájecí pružina, střední kontakt (ručka) i krajní kontakty
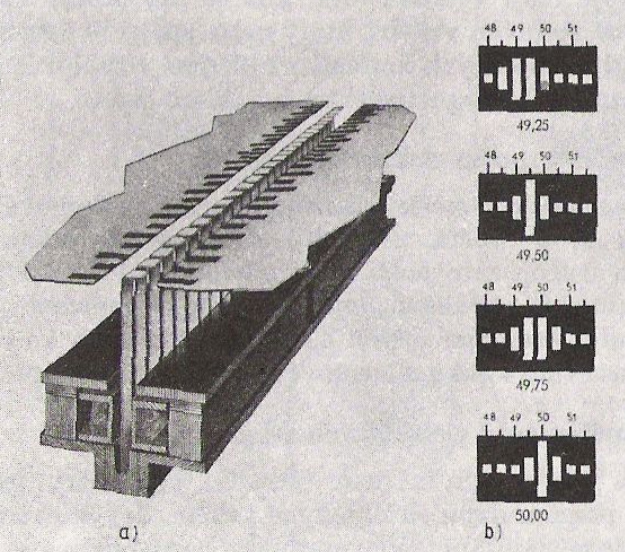
Princip rezonančního relé se používá dnes už velmi málo a je spíše zajímavostí, i když ukazuje, jak jednoduše lze řešit úlohy, které dnes moderními prostředky vyžadují mnoho elektronických součástek nebo silný výpočetní výkon. Pro snadnější pochopení si nejprve ukážeme rezonanční měřič kmitočtu sítě, tak jak se kdysi montoval vedle „hodin“ do rozvodných skříní.
Cívkou elektromagnetu prochází střídavý proud sítě (50 Hz) a v magnetickém poli tohoto elektromagnetu je několik jazýčků z magnetického materiálu. Jazýčky jsou pružné a různě dlouhé, s postupně odstupňovanou délkou. Z toho plyne, že mají také různý mechanický rezonanční kmitočet, jsou různě „naladěné“. Když se kmitočet magnetického pole shoduje s mechanickou rezonancí jazýčku, rozkmitá se jazýček s velkou amplitudou, když je blízký ale neshoduje se, kmitá jen málo, při větší odchylce se jazýček téměř nerozkmitá. To, který z jazýčků kmitá, je jasně vidět. Z toho je možné určit (s dost jemným rozlišením třeba 0,5 Hz) kmitočet sítě.
 Rezonanční relé je totéž, jen jazýčky jsou podstatně hruběji odstupňované a v blízkosti jazýčků jsou kontakty. Ten jazýček, který hodně kmitá, naráží do kontaktu a spojuje (přerušovaně a možná nepravidelně, ale často) elektrický obvod.
Rezonanční relé je totéž, jen jazýčky jsou podstatně hruběji odstupňované a v blízkosti jazýčků jsou kontakty. Ten jazýček, který hodně kmitá, naráží do kontaktu a spojuje (přerušovaně a možná nepravidelně, ale často) elektrický obvod.
K čemu se podobné zařízení používalo? Třeba jako dekodér v RC soupravách k dálkovému řízení modelů a robotů. Vysílač vysílal na jediném kmitočtu nosnou vlnu amplitudově modulovanou tónem. V přijímači se zvukový kmitočet dekódoval a zavedl do elektromagnetu, o zbytek se postaralo rezonanční relé. Jeho jazýčky vybraly ten správný kmitočet (či spíše naopak, daný kmitočet rozkmital ten správný jazýček), kondenzátor signál prodloužil a následné „obyčejné“ relé sepnulo motor serva. Elektronika v tom byla minimální, jen na úrovni přijímače a demodulování tónu, zbytek byla relé. Ano, takto fungovalo dálkové ovládání modelů i robotů ještě v době, kdy elektronika superhetového přijímače (s jedním mezifrekvenčním kmitočtem) už byla osazena tranzistory.
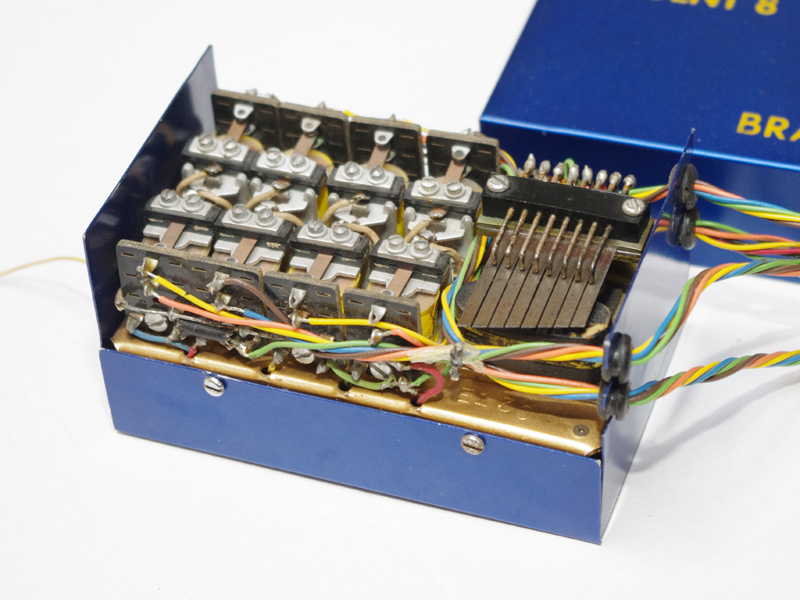
Vpravo „osmikanálové“ rezonanční relé s kontakty viditelnými nahoře, vlevo osm relé pro spínání motorů

Už relativně miniaturní superhet s tranzistory a miniaturním dvanáctikanálovým rezonančním relé
Mimochodem, od těchto rezonančních relé a počtu jejich jazýčků se odvodilo počítání „kanálů“ RC souprav, které dodnes přetrvalo třeba u firmy Graupner. Jedna funkce potřebovala k ovládání dva „kanály“ (třeba funkce směru = kanál vpravo + kanál vlevo), takže uvedené 12-ti jazýčkové relé řídilo v dnes obvyklém počítání šest serv (nebo 12 světelných okruhů). Šroubky na kontaktech nastavovaly okamžik sepnutí.
Kdybychom stejnou modulaci měli dekódovat dnes, potřebovali bychom při analogovém řešení pro každý z kmitočtů pásmovou laděnou propust s LC filtrem, pak vyhodnocení amplitudy signálu za filtrem, dál monostabilní klopný obvod a polovodičový spínač (to vše vlastně 12x). Pro digitální řešení bychom zvukový signál museli vzorkovat AD převodníkem a v reálném čase dělat frekvenční analýzu, vyhodnotit nejvyšší aplitudu, odfiltrovat rušivé a náhodné signály a podle výsledku sepnout polovodičový spínač. Přeji příjemné programování ….. . Ono to relé je nemoderní a určitě poruchovější, ale ruku na srdce, nebylo vlastně mnohem jednodušší a opravitelnější v porovnání se současnou technikou?