

Napájení krokových motorů
Krokové motory můžeme v zásadě napájet dvěma způsoby:
Napájení jmenovitým napětím
Nejmenší krokové motory mají statorové cívky takových parametrů, že pracovní proud dosahuje jmenovité velikosti při standardizovaných napájecích napětích. Tyto motory jsou určeny jen pro nejjednodušší aplikace, protože tento způsob napájení nedovoluje dosáhnout vyšších rychlostí otáčení ani větších točivých momentů. Přesto se s těmito motory můžeme často setkat ve výrobcích, určených pro automobilový průmysl (nastavení zpětných zrcátek, nastavení světlometů) a ve spotřebním průmyslu, především ve starších tiskárnách.
V praxi se nejčastěji setkáte s napájecími napětími 5, 12 a 24 V.
Napájení proudem jmenovité hodnoty
Aby se eliminovaly nevýhody, způsobené napěťovým napájením, převážná většina krokových motorů se napájí z proudového zdroje, jehož charakteristika zaručuje, že nárůst proudu statorovým vinutím bude co možná nejrychlejší.
Příkon motorů a provozní teplota
Příkon běžných krokových motorů se pohybuje od několika set miliwattů, až po několik desítek wattů (u větších motorů). Maximální ztrátový výkon krokového motoru je dán pouze tepelnou odolností jeho vinutí. Tento parametr je bohužel v údajích výrobce motoru uveden jen vzácně, proto se většinou musíme spokojit s empirickou zkušeností, která nám říká, že běžný krokový motor by se v provozu neměl ohřívat více, než o 65 °C nad teplotu okolního prostředí.
Ztrátový výkon motoru můžeme zvýšit použitím přídavného chladiče nebo chlazením ofukem.
Řízení velikosti proudu, protékajícího vinutím
Účelem řízení velikosti proudu, protékajícího vinutím, je omezit ztrátový výkon na odporu vinutí na přípustnou velikost a zároveň dosáhnout co nejlepších mechanických parametrů motoru motoru.
Existují dva hlavní principy: lineární omezení proudu a pulsní řízení proudu. Oba způsoby je možno použít pro bipolární i unipolární výkonové budiče.
Omezení proudu předřadným rezistorem
 Tento způsob řízení, využívá k omezení proudu vinutím sériově zapojeného předřadného rezistoru takové velikosti, která zaručí omezení proudu na přípustnou hodnotu. Díky tomu je možno použít pro napájení motoru mnohem vyšší napětí a nárůst proudu ve vinutí na jmenovitou hodnotu je díky většímu poměru V/L mnohem rychlejší. Nevýhodou tohoto způsobu řízení je značný ztrátový výkon na předřadném rezistoru.
Tento způsob řízení, využívá k omezení proudu vinutím sériově zapojeného předřadného rezistoru takové velikosti, která zaručí omezení proudu na přípustnou hodnotu. Díky tomu je možno použít pro napájení motoru mnohem vyšší napětí a nárůst proudu ve vinutí na jmenovitou hodnotu je díky většímu poměru V/L mnohem rychlejší. Nevýhodou tohoto způsobu řízení je značný ztrátový výkon na předřadném rezistoru.
Zajímavým prvkem zapojení je zenerova dioda, zapojená do série s diodami, omezujícími přepěťové špičky na vinutích, díky níž je možno dosáhnout vyšších rychlostí otáčení, ovšem za cenu většího napěťového namáhání polovodičových spínacích prvků.
Dvouhladinové řízení proudu
 Pro napájení vinutí motoru se v tomto případě používá sekundární zdroj s vyšším napětím, který je k vinutí připojen jen do té doby, než proud vinutím naroste na požadovanou hodnotu. Po nastavené době nebo až proud dosáhne této hodnoty, se sekundární zdroj odpojí. Nevýhodou tohoto způsobu řízení je potřeba druhého napájecího zdroje.
Pro napájení vinutí motoru se v tomto případě používá sekundární zdroj s vyšším napětím, který je k vinutí připojen jen do té doby, než proud vinutím naroste na požadovanou hodnotu. Po nastavené době nebo až proud dosáhne této hodnoty, se sekundární zdroj odpojí. Nevýhodou tohoto způsobu řízení je potřeba druhého napájecího zdroje.
Pulsní řízení proudu (Chopper Control)
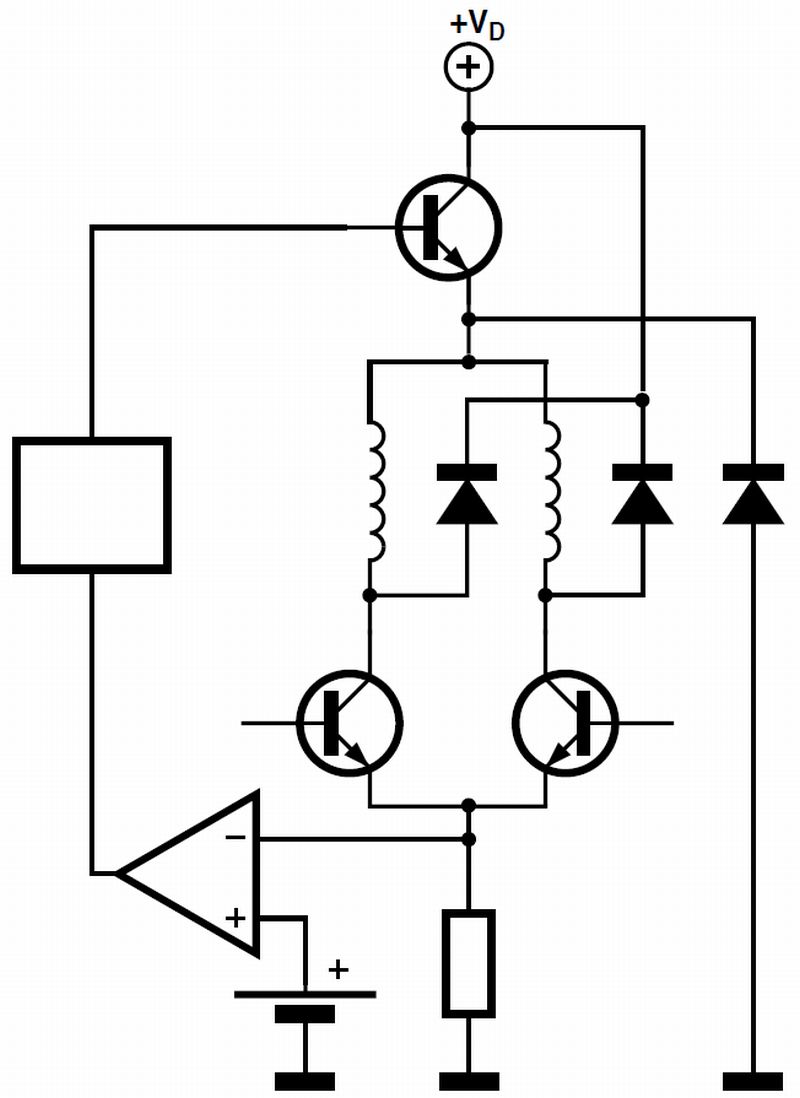 Pulsní ovládání velikosti proudu je optimálním způsobem zajištění rychlého nárůstu proudu vinutím motoru a zároveň jeho omezením na bezpečnou velikost. Základní myšlenkou je použití co nejvyššího napájecího napětí, které mnohonásobně převyšuje nominální napětí motoru. Doba nárůstu napětí na vinutí je při tomto způsobu napájení podstatně kratší, než ve výše zmiňovaných zapojeních.
Pulsní ovládání velikosti proudu je optimálním způsobem zajištění rychlého nárůstu proudu vinutím motoru a zároveň jeho omezením na bezpečnou velikost. Základní myšlenkou je použití co nejvyššího napájecího napětí, které mnohonásobně převyšuje nominální napětí motoru. Doba nárůstu napětí na vinutí je při tomto způsobu napájení podstatně kratší, než ve výše zmiňovaných zapojeních.
Díky pulsnímu řízení proudu je stále zachována jmenovitá střední hodnota napětí a tím i velikosti proudu vinutím motoru. Zpětné vazby, nutné k regulaci proudu na konstantní hodnotu je dosaženo tím, že se velikost proudu snímá jako úbytek napětí na rezistoru, zařazeném v sérii s vinutím motoru. Toto napětí poskytuje zpětnou vazbu obvodu, řídícímu velikost proudu, protékajícího vinutím motoru.
Nepřehlédněte také tyto články: